
Mesurer la vitesse de rotation de la terre sur elle-même avec un gyromètre, comme ceux qui se trouvent dans les manettes de jeux est un petit défi assez excitant. Ces gyromètres en effet, sont faits pour mesurer des vitesses de rotation imprimées aux manettes de jeux par des joueurs très réactifs… vitesses qui sont bien supérieures à la vitesse de rotation de notre vieille terre de 360° en 24H, soit 0.00417 °/s !
Difficulté
Difficile
Durée
7 jour(s)
Catégories
Science & Biologie
Coût
100 EUR (€)
Introduction
D’abord, rendons à Cesar ce qui est à Cesar ! L’idée de cette mesure vient d’un site internet qui publie des ressources pédagogiques dans le domaine de la science et de la technologie (www.pabr.org). La description de l’expérience initiale vaut le détour ! Cette expérience en effet part d’une manette de jeux posée sur un plateau de tourne-disques … (http://www.pabr.org/copernitron/copernitron.fr.html).
De plus l’article rappelle les différentes tentatives de mesures qui se sont déroulées principalement au XIXème siècle et dont le point d’orgue a été la célèbre expérience de Foucault avec son célèbre pendule ( https://fr.wikipedia.org/wiki/Pendule_de_Foucault ). On en retient que mettre en évidence directement la rotation de la terre par une mesure inertielle, n'est pas chose facile.
Matériaux
Outils
Étape 1 - Le défi
La vitesse de rotation de la terre sur elle-même est de 360 / 24 / 3600 = 0.00417 °/s.
Pour faire cette mesure, on va utiliser le circuit intégré BNO055 de Bosch qui est un capteur inertiel réalisé en Technologie MEMS (Micro Electro-Mechanical System). Dans la partie gyromètre qui nous intéresse ici, une masse d’épreuve est mise en vibration et réagit aux rotations grâce à la force de Coriolis, comme le pendule de Foucault. En quelque sorte c’est un pendule de Foucault dans un circuit intégré…. Mais les dimensions ont été fantastiquement réduites, comme on peut le voir sur la figure 1....
Le défi réside dans l'utilisation de ce type de circuit à bas coût conçu pour les manettes de jeux. La plage de mesure la plus sensible est en effet de +/- 125 °/s, codée sur 16 bits (figure 2).
Dans ces conditions le pas de quantification est de 250 / 2^16 = 0.0038 °/s, très proche de la vitesse de rotation que l'on cherche à mesurer....
Heureusement il y a du bruit ! C'est ce qui va nous permettre de sortir du pas de quantification ...... sinon ce serait sans espoir de pouvoir faire une mesure de la rotation terrestre avec un minimum de précision !
La figure 2 montre un enregistrement du bruit qui oscille sur près de 70 pas de quantification (LSB) en crête à crête. On sent bien que la stratégie va être de moyenner de nombreuses mesures.... tout en évitant les dérives long terme et les biais...



Étape 2 - Principes des mesures de rotation de la terre
Le BNO055 en Occitanie....
Les 4 premières figures indiquent l'orientation du circuit lorsque l'expérience se déroule dans un coin d'Occitanie où la latitude est très proche de 45° Nord.
Mesures par différence entre deux positions
On ne peut pas mesurer directement des valeurs de la projection de Omega _terre car la réponse du capteur comporte toujours un offset inconnu. Par contre en faisant la différence entre deux mesures à deux positions différentes, on s'affranchit de cet offset. Par exemple la différence entre la position Z // Omega et Z antiparallèle à Omega nous donne deux fois la vitesse de rotation de la terre tout en annulant l'offset. De même la différence entre deux positions perpendiculaires à l'axe de rotation terre doit être égale à zéro.
Mesures par modulation et analyse spectrale
Les mesures par différences nécessitent de connaitre la latitude de l'expérience afin de régler la position de Z autour de Y. Mais on peut imaginer que l'on ne connait pas la latitude. On sait seulement à l'aide d'une boussole orienter le plan de rotation de Z dans la direction Nord-Sud.
Simulation des séquences d'acquisition
Les deux dernières animations illustrent la séquence de mesures par différence et par modulation sinusoïdale.
Toutes les mesures se font en statique
Notons que les séquences d'acquisition se font toutes par pas stables au cours desquels les mesures sont acquises. La rotation du BNO055 autour de son axe Y avec une vitesse angulaire bien plus importante que celle de la terre "polluerait" notre mesure de façon importante à cause de couplages entre les axes. Par exemple celui généré par le non parallélisme entre l'axe Y et l'axe de rotation.




Étape 3 - Le banc de mesure
Constitution
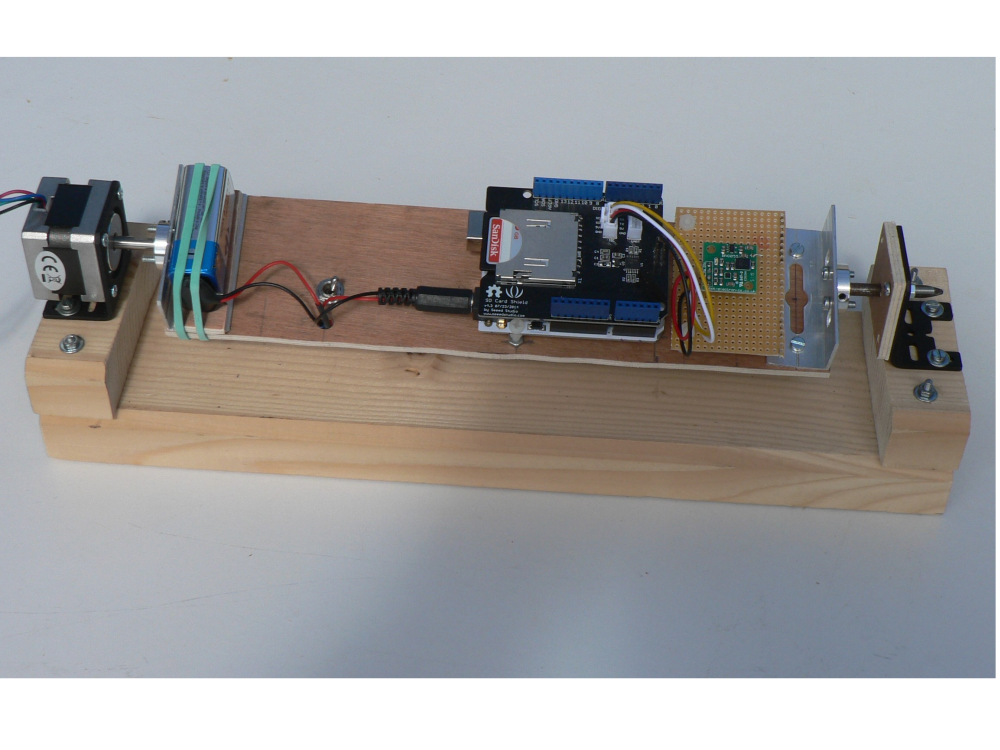
Le banc de mesures est constitué par une planchette support qui tourne autour d’un axe horizontal, mu par un moteur pas à pas. Sur la planchette support se trouve une carte Arduino UNO avec un shield carte SD pour stocker les mesures de vitesse de rotation. A côté on a fixé le petit circuit supportant le gyromètre BNO055. Une pile pour l’alimentation et un interrupteur complètent le montage. Le moteur pas à pas est contrôlé par une autre carte Arduino UNO et un shield moteurs.
On peut trouver facilement tous ces composants, par exemple ici :
Shield SD : https://www.gotronic.fr/art-shield-carte-sd-v4-103030005-21518.htm
Moteur pas à pas : https://www.gotronic.fr/art-moteur-14hm11-0404s-23048.htm
Shield moteurs : https://www.gotronic.fr/art-commande-i2c-de-2-moteurs-cc-grove-108020103-29016.htm
Module Boussole BNO055 : https://www.gotronic.fr/art-module-boussole-bno055-27795.htm
Utilisation
Avec ce banc il est très facile de reproduire les séquences de mesure décrites au paragraphe précédent. Comme les rotations en effet se font autour de l'axe Y du BNO055, il suffit d'orienter le plan de rotation des vecteurs Z et X dans la direction Nord-Sud. Cette orientation étant faite, on déclenche l'enregistrement continu sur la carte des vitesses de rotation sur les 3 axes. Enfin on lance le programme de commande du moteur pas à pas pour balayer soit deux positions (mesure par différence de deux positions), soit pour échantillonner un certain nombre de positions par tour pendant plusieurs tours (analyse spectrale).

Draft
 Français
Français English
English Deutsch
Deutsch Español
Español Italiano
Italiano Português
Português