| Ligne 64 : | Ligne 64 : | ||
'''Composants:''' | '''Composants:''' | ||
| + | |||
| + | - arduino UNO | ||
- 20 cables M/M | - 20 cables M/M | ||
- 10 cables M/F | - 10 cables M/F | ||
| + | |||
| + | - 2 [https://www.gotronic.fr/art-servomoteur-df9gms-19377.htm servomoteur DF9GMS] | ||
- 1 plaque de prototypage | - 1 plaque de prototypage | ||
| Ligne 100 : | Ligne 104 : | ||
{{Tuto Step | {{Tuto Step | ||
|Step_Title=<translate>Cablage</translate> | |Step_Title=<translate>Cablage</translate> | ||
| + | |Step_Content=<translate>A partir du plan de cablage fourni à l'étape 1, il nous faut rajouter | ||
| + | |||
| + | - relier 1 Wago 5 entrée au premier Wago ou se rejoignent les alimentations des composants | ||
| + | |||
| + | - relier 1 Wago 5 entrées au premier Wago ou se rejoignent les GND des differents composants. | ||
| + | |||
| + | - relier 1 Wago 3 entrées à la broche SDL de la carte Arduino | ||
| + | |||
| + | - relier 1 Wago 3 entrées à la broche SDA de la carte Arduino | ||
| + | |||
| + | |||
| + | - Sur les Wago 5 entrées, brancher les VCC et GND des servomoteurs et du CSS811. | ||
| + | |||
| + | - Sur les bornes restantes des Wago 3 entrées, brancher les SDA et SCL du CSS811 et du BME 280. | ||
| + | |||
| + | |||
| + | |||
| + | <br /></translate> | ||
| + | }} | ||
| + | {{Tuto Step | ||
| + | |Step_Title=<translate>Code</translate> | ||
| + | |Step_Content=<translate><syntaxhighlight lang="arduino" line="1"> | ||
| + | // librairies pour le BME | ||
| + | #include <BME280I2C.h> | ||
| + | #include "DFRobot_CCS811.h" | ||
| + | #include <Wire.h> | ||
| + | #include "ssd1306.h" | ||
| + | #include "FastLED.h" | ||
| + | #include "DFRobot_CCS811.h" | ||
| + | #include <Servo.h> | ||
| + | //ici le nombre total de leds | ||
| + | #define NUM_LEDS 12 | ||
| + | // ici la pin pour les leds | ||
| + | #define DATA_PIN 6 | ||
| + | // déclaration d'un tableau pour les leds | ||
| + | CRGB leds[NUM_LEDS]; | ||
| + | DFRobot_CCS811 CCS811; | ||
| + | Servo ServoCO2; | ||
| + | Servo ServoTVOC; | ||
| + | |||
| + | const int POTAR = A0; // broche du potar | ||
| + | const int LED = 9; // broche de la LED | ||
| + | int valPOTAR = 0; //RAZ valeur | ||
| + | |||
| + | int angle=120; | ||
| + | int angle2=0; | ||
| + | |||
| + | BME280I2C::Settings settings( | ||
| + | BME280::OSR_X1, | ||
| + | BME280::OSR_X1, | ||
| + | BME280::OSR_X1, | ||
| + | BME280::Mode_Forced, | ||
| + | BME280::StandbyTime_1000ms, | ||
| + | BME280::Filter_Off, | ||
| + | BME280::SpiEnable_False, | ||
| + | 0x77 // I2C address. I2C specific. | ||
| + | ); | ||
| + | |||
| + | BME280I2C bme(settings); | ||
| + | |||
| + | /* Ces tableaux de caractères serviront UNIQUEMENT pour l'affichage à l'écran. | ||
| + | * Il faudra afficher ces variables et non les "floats" déclarées pour le capteur, | ||
| + | * l'écran ne reconnaissant que des chaînes de caractère | ||
| + | */ | ||
| + | |||
| + | char tempC[9]; | ||
| + | char humC[10]; | ||
| + | char presC[11]; | ||
| + | |||
| + | void setup() | ||
| + | { | ||
| + | Serial.begin(9600); | ||
| + | ServoCO2.attach(5); | ||
| + | ServoTVOC.attach(3); | ||
| + | |||
| + | // on vérifie que le capteur COE2/TVOC est branché | ||
| + | while(CCS811.begin() != 0){ | ||
| + | Serial.println("failed to init chip, please check if the chip connection is fine"); | ||
| + | delay(1000); | ||
| + | } | ||
| + | |||
| + | // déclaration entrée et sortie de Potar et LED. Lecture en enregistrement dans la variable valPOTAR de la valeur analog du Potar | ||
| + | |||
| + | pinMode(POTAR, INPUT); | ||
| + | pinMode (LED, OUTPUT); | ||
| + | valPOTAR = analogRead (POTAR); | ||
| + | |||
| + | // tout ce blabla sert uniquement à vérifier si un capteur est présent et bien branché | ||
| + | |||
| + | while(!Serial) {} // Wait | ||
| + | |||
| + | Wire.begin(); | ||
| + | |||
| + | while(!bme.begin()) | ||
| + | { | ||
| + | Serial.println("Could not find BME280 sensor!"); | ||
| + | delay(1000); | ||
| + | } | ||
| + | |||
| + | // bme.chipID(); // Deprecated. See chipModel(). | ||
| + | switch(bme.chipModel()) | ||
| + | { | ||
| + | case BME280::ChipModel_BME280: | ||
| + | Serial.println("Found BME280 sensor! Success."); | ||
| + | break; | ||
| + | case BME280::ChipModel_BMP280: | ||
| + | Serial.println("Found BMP280 sensor! No Humidity available."); | ||
| + | break; | ||
| + | default: | ||
| + | Serial.println("Found UNKNOWN sensor! Error!"); | ||
| + | } | ||
| + | |||
| + | // on lance l'écran et on le colore de noir | ||
| + | |||
| + | ssd1306_128x64_i2c_init(); | ||
| + | ssd1306_fillScreen(0x00); | ||
| + | // on lance la typo | ||
| + | ssd1306_setFixedFont(ssd1306xled_font6x8); | ||
| + | |||
| + | FastLED.addLeds<WS2811, DATA_PIN, GRB>(leds, NUM_LEDS); | ||
| + | // on peut régler ici la luminosité : 0-255 | ||
| + | LEDS.setBrightness(50); | ||
| + | |||
| + | } | ||
| + | |||
| + | void loop() | ||
| + | |||
| + | { | ||
| + | |||
| + | analogRead (A0); | ||
| + | valPOTAR = analogRead (POTAR); | ||
| + | analogWrite (9, valPOTAR/4); | ||
| + | // On déclare 3 variables : température, humidité, pression | ||
| + | float temp(NAN), hum(NAN), pres(NAN); | ||
| + | |||
| + | if(CCS811.checkDataReady() == true){ | ||
| + | Serial.print("CO2: "); | ||
| + | Serial.print(CCS811.getCO2PPM()); | ||
| + | Serial.print("ppm, TVOC: "); | ||
| + | Serial.print(CCS811.getTVOCPPB()); | ||
| + | Serial.println("ppb"); | ||
| + | delay(1000); | ||
| + | |||
| + | } else { | ||
| + | Serial.println("Data is not ready!"); | ||
| + | } | ||
| + | |||
| + | |||
| + | // Déclenchement du capteur | ||
| + | BME280::TempUnit tempUnit(BME280::TempUnit_Celsius); | ||
| + | BME280::PresUnit presUnit(BME280::PresUnit_hPa); | ||
| + | bme.read(pres, temp, hum, tempUnit, presUnit); | ||
| + | |||
| + | // ces lignes servent à convertir les valeurs "float" du capteur en "char" destinées à l'écran | ||
| + | // (utile uniquement pour votre code final) | ||
| + | dtostrf (temp,5,1,tempC); | ||
| + | dtostrf (hum,5,1,humC); | ||
| + | dtostrf (pres,5,2,presC); | ||
| + | |||
| + | // on imprime les valeurs sur le moniteur série | ||
| + | |||
| + | if(CCS811.checkDataReady() == true){ | ||
| + | Serial.print("CO2: "); | ||
| + | Serial.print(CCS811.getCO2PPM()); | ||
| + | Serial.print("ppm, TVOC: "); | ||
| + | Serial.print(CCS811.getTVOCPPB()); | ||
| + | Serial.println("ppb"); | ||
| + | |||
| + | } else { | ||
| + | Serial.println("Data is not ready!"); | ||
| + | } | ||
| + | /*! | ||
| + | * @brief Set baseline | ||
| + | * @param get from getBaseline.ino | ||
| + | */ | ||
| + | CCS811.writeBaseLine(0x447B); | ||
| + | //delay cannot be less than measurement cycle | ||
| + | delay(1000); | ||
| + | |||
| + | // Première ligne, normal | ||
| + | |||
| + | ssd1306_printFixed (0, 8, "Temp:", STYLE_NORMAL); | ||
| + | ssd1306_printFixed(56, 8, tempC , STYLE_BOLD); | ||
| + | ssd1306_printFixed (96, 8, "C", STYLE_NORMAL); | ||
| + | ssd1306_printFixed(0, 16,"RH: ", STYLE_NORMAL); | ||
| + | ssd1306_printFixed(56, 16, humC , STYLE_BOLD); | ||
| + | ssd1306_printFixed(96, 16,"%", STYLE_NORMAL); | ||
| + | ssd1306_printFixed(0, 24, "Pres: ", STYLE_NORMAL); | ||
| + | ssd1306_printFixed(56, 24, presC , STYLE_BOLD); | ||
| + | ssd1306_printFixed(96, 24, "hPa" , STYLE_NORMAL); | ||
| + | |||
| + | |||
| + | |||
| + | int CO2; | ||
| + | CO2 = map (CCS811.getCO2PPM(),400,6000,0, 120); | ||
| + | |||
| + | for (int position=angle; position < CO2 ; position++) { | ||
| + | ServoCO2.write(position); | ||
| + | Serial.println(position); | ||
| + | angle = position; | ||
| + | delay(20); | ||
| + | } | ||
| + | for (int position=angle ; position > CO2 ; position--) { | ||
| + | ServoCO2.write(position); | ||
| + | Serial.println(position); | ||
| + | angle = position; | ||
| + | delay(20); | ||
| + | } | ||
| + | |||
| + | int TVOC; | ||
| + | TVOC = map (CCS811.getTVOCPPB(),8000,0,0, 120); | ||
| + | |||
| + | for (int position=angle2; position < TVOC ; position++) { | ||
| + | ServoTVOC.write(position); | ||
| + | Serial.println(position); | ||
| + | angle2 = position; | ||
| + | delay(20); | ||
| + | } | ||
| + | for (int position=angle2 ; position > TVOC ; position--) { | ||
| + | ServoTVOC.write(position); | ||
| + | Serial.println(position); | ||
| + | angle2 = position; | ||
| + | delay(20); | ||
| + | } | ||
| + | |||
| + | |||
| + | |||
| + | if (hum > 40 && hum <50) | ||
| + | { | ||
| + | //Allumage rotatif des Leds 0 à 5 en bleu suivant valeur de délais | ||
| + | |||
| + | for( int i = 0; i < 12; i++){ | ||
| + | leds[i] = CRGB::Green; | ||
| + | FastLED.show(); | ||
| + | delay (60); | ||
| + | } | ||
| + | for( int i = 0; i < 12; i++){ | ||
| + | leds[i] = CRGB::Black; | ||
| + | FastLED.show(); | ||
| + | delay (20); | ||
| + | } | ||
| + | } | ||
| + | else { | ||
| + | //Allumage rotatif des Leds 6 à 11 en rouge suivant valeur de délais | ||
| + | for( int i = 0; i < 12; i++){ | ||
| + | leds[i] = CRGB::Red; | ||
| + | FastLED.show(); | ||
| + | delay (20); | ||
| + | } | ||
| + | } | ||
| + | // Extinction rotative des 12 Led suivant valeur de délais | ||
| + | for( int i = 0; i < 12; i++){ | ||
| + | leds[i] = CRGB::Black; | ||
| + | FastLED.show(); | ||
| + | delay (10); | ||
| + | } | ||
| + | } | ||
| + | |||
| + | |||
| + | |||
| + | |||
| + | |||
| + | |||
| + | </syntaxhighlight></translate> | ||
| + | }} | ||
| + | {{Tuto Step | ||
| + | |Step_Title=<translate>Support décoratif en bois</translate> | ||
|Step_Content=<translate></translate> | |Step_Content=<translate></translate> | ||
}} | }} | ||
{{Tuto Step | {{Tuto Step | ||
| − | |Step_Title=<translate></translate> | + | |Step_Title=<translate>Impression 3D</translate> |
| − | |Step_Content=<translate></translate> | + | |Step_Content=<translate>-Impression 3D de supports de servomoteur. STL récupéré sur Thingiverse. |
| + | |||
| + | - Impression 3D d'un dessin perso de bouton de potentiometre</translate> | ||
}} | }} | ||
{{Notes | {{Notes | ||
Version actuelle datée du 16 juin 2022 à 13:36
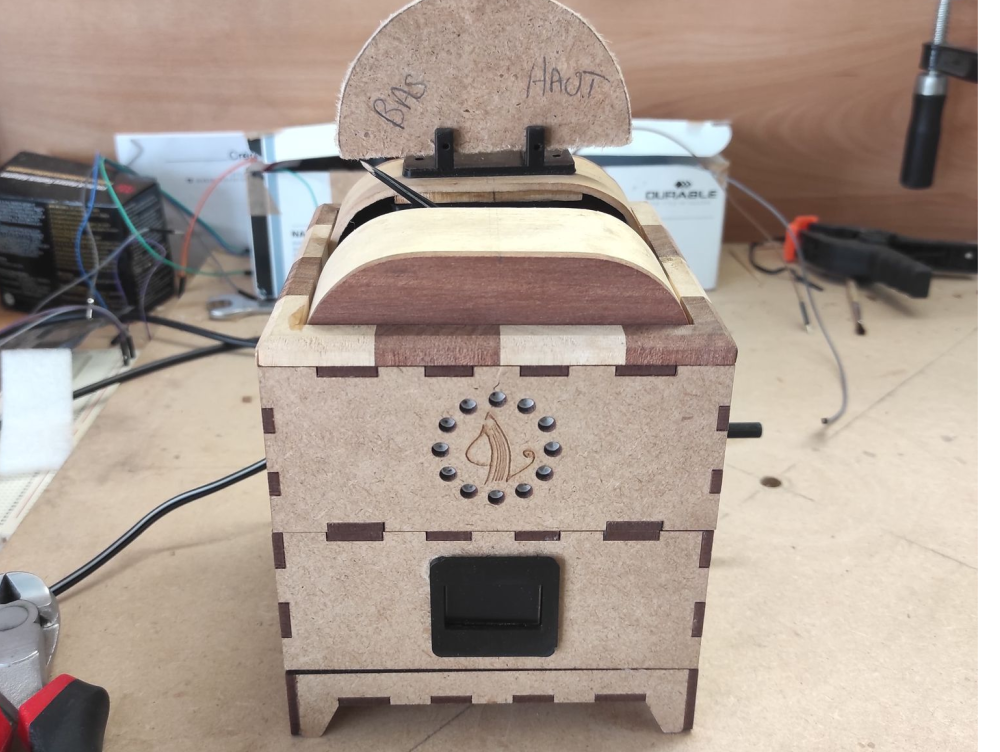
L'objectif de ce projet est de fabriquer et programmer un module de contrôle de qualité de l'air ambiant (TVOC et eCO2) qui viendra se greffer en tant que 3eme étage sur une station météo Bentolux, et qui permettra l'affichage des valeurs sur deux demi-cadrans faussement analogiques.

Difficulté
Moyen
Durée
4 jour(s)
Catégories
Électronique, Bien-être & Santé
Coût
150 EUR (€)
Introduction
La Bentolux est une station météo construite dans le cadre des cours de fabrication numérique dispensés par l'IMT d'Albi. Elle est d'abord constitué de deux premiers étages, qui sont le socle commun à tout les apprenants. Le premier étage contient la carte Arduino, une Led actionnée par potentiomètre, ainsi qu'un écran d'affichage LCD. Le second étage comporte le capteur météo dont les valeurs ( Temperature, hygrometrie relative et pression atmosphériques) sont envoyés vers l'écran LCD., ainsi qu'un anneau de Led permettant des animations visuelles en fonction des valeurs retournées. Le 3eme étage, objet de ce tuto, vise a afficher grâce a des servomoteurs les valeurs de eCO2 et de TVOC sous la forme de cadran à aiguilles.
Mp4
Matériaux
Outils
Étape 1 - Matériaux et outils
Outils
- Fer à souder
- Pince coupante
- Pince à dénuder
- Multimètre
- Colle cyanoacrylate
- Cintreuse
- Scie japonaise
- Ciseaux
Matériaux:
- Etain
- Un carrelet de méranti blanc
- Un carrelet d'acajou
- Une plaque d'isorel
Composants:
- arduino UNO
- 20 cables M/M
- 10 cables M/F
- 1 plaque de prototypage
- 1 potentionmetre
- 1 Led Blanche
- 1 Afficheur OLED 0,96'' I2C TF052
- 1 Anneau NeoPixel 12 leds RGB ADA1643
- 1 capteur pression/temp/hum BME280
- 1 Capteur de qualité d'air CCS811 SEN0339
- 4 Wago 5 entrées
- 2 Wago 3 entrées
Étape 2 - Prérequis - Bentolux Station Météo
- Decoupe au laser des parois de la boite (DOC1)
- Assemblage de la boite (DOC2)
- Branchement des composants (DOC3)
- Programmation du code pour faire interagir les élements (ecran LCD, capteur Temp/Hum, anneau OLED) (DOC4)
Étape 3 - Cablage
A partir du plan de cablage fourni à l'étape 1, il nous faut rajouter
- relier 1 Wago 5 entrée au premier Wago ou se rejoignent les alimentations des composants
- relier 1 Wago 5 entrées au premier Wago ou se rejoignent les GND des differents composants.
- relier 1 Wago 3 entrées à la broche SDL de la carte Arduino
- relier 1 Wago 3 entrées à la broche SDA de la carte Arduino
- Sur les Wago 5 entrées, brancher les VCC et GND des servomoteurs et du CSS811.
- Sur les bornes restantes des Wago 3 entrées, brancher les SDA et SCL du CSS811 et du BME 280.
Étape 4 - Code
1 // librairies pour le BME
2 #include <BME280I2C.h>
3 #include "DFRobot_CCS811.h"
4 #include <Wire.h>
5 #include "ssd1306.h"
6 #include "FastLED.h"
7 #include "DFRobot_CCS811.h"
8 #include <Servo.h>
9 //ici le nombre total de leds
10 #define NUM_LEDS 12
11 // ici la pin pour les leds
12 #define DATA_PIN 6
13 // déclaration d'un tableau pour les leds
14 CRGB leds[NUM_LEDS];
15 DFRobot_CCS811 CCS811;
16 Servo ServoCO2;
17 Servo ServoTVOC;
18
19 const int POTAR = A0; // broche du potar
20 const int LED = 9; // broche de la LED
21 int valPOTAR = 0; //RAZ valeur
22
23 int angle=120;
24 int angle2=0;
25
26 BME280I2C::Settings settings(
27 BME280::OSR_X1,
28 BME280::OSR_X1,
29 BME280::OSR_X1,
30 BME280::Mode_Forced,
31 BME280::StandbyTime_1000ms,
32 BME280::Filter_Off,
33 BME280::SpiEnable_False,
34 0x77 // I2C address. I2C specific.
35 );
36
37 BME280I2C bme(settings);
38
39 /* Ces tableaux de caractères serviront UNIQUEMENT pour l'affichage à l'écran.
40 * Il faudra afficher ces variables et non les "floats" déclarées pour le capteur,
41 * l'écran ne reconnaissant que des chaînes de caractère
42 */
43
44 char tempC[9];
45 char humC[10];
46 char presC[11];
47
48 void setup()
49 {
50 Serial.begin(9600);
51 ServoCO2.attach(5);
52 ServoTVOC.attach(3);
53
54 // on vérifie que le capteur COE2/TVOC est branché
55 while(CCS811.begin() != 0){
56 Serial.println("failed to init chip, please check if the chip connection is fine");
57 delay(1000);
58 }
59
60 // déclaration entrée et sortie de Potar et LED. Lecture en enregistrement dans la variable valPOTAR de la valeur analog du Potar
61
62 pinMode(POTAR, INPUT);
63 pinMode (LED, OUTPUT);
64 valPOTAR = analogRead (POTAR);
65
66 // tout ce blabla sert uniquement à vérifier si un capteur est présent et bien branché
67
68 while(!Serial) {} // Wait
69
70 Wire.begin();
71
72 while(!bme.begin())
73 {
74 Serial.println("Could not find BME280 sensor!");
75 delay(1000);
76 }
77
78 // bme.chipID(); // Deprecated. See chipModel().
79 switch(bme.chipModel())
80 {
81 case BME280::ChipModel_BME280:
82 Serial.println("Found BME280 sensor! Success.");
83 break;
84 case BME280::ChipModel_BMP280:
85 Serial.println("Found BMP280 sensor! No Humidity available.");
86 break;
87 default:
88 Serial.println("Found UNKNOWN sensor! Error!");
89 }
90
91 // on lance l'écran et on le colore de noir
92
93 ssd1306_128x64_i2c_init();
94 ssd1306_fillScreen(0x00);
95 // on lance la typo
96 ssd1306_setFixedFont(ssd1306xled_font6x8);
97
98 FastLED.addLeds<WS2811, DATA_PIN, GRB>(leds, NUM_LEDS);
99 // on peut régler ici la luminosité : 0-255
100 LEDS.setBrightness(50);
101
102 }
103
104 void loop()
105
106 {
107
108 analogRead (A0);
109 valPOTAR = analogRead (POTAR);
110 analogWrite (9, valPOTAR/4);
111 // On déclare 3 variables : température, humidité, pression
112 float temp(NAN), hum(NAN), pres(NAN);
113
114 if(CCS811.checkDataReady() == true){
115 Serial.print("CO2: ");
116 Serial.print(CCS811.getCO2PPM());
117 Serial.print("ppm, TVOC: ");
118 Serial.print(CCS811.getTVOCPPB());
119 Serial.println("ppb");
120 delay(1000);
121
122 } else {
123 Serial.println("Data is not ready!");
124 }
125
126
127 // Déclenchement du capteur
128 BME280::TempUnit tempUnit(BME280::TempUnit_Celsius);
129 BME280::PresUnit presUnit(BME280::PresUnit_hPa);
130 bme.read(pres, temp, hum, tempUnit, presUnit);
131
132 // ces lignes servent à convertir les valeurs "float" du capteur en "char" destinées à l'écran
133 // (utile uniquement pour votre code final)
134 dtostrf (temp,5,1,tempC);
135 dtostrf (hum,5,1,humC);
136 dtostrf (pres,5,2,presC);
137
138 // on imprime les valeurs sur le moniteur série
139
140 if(CCS811.checkDataReady() == true){
141 Serial.print("CO2: ");
142 Serial.print(CCS811.getCO2PPM());
143 Serial.print("ppm, TVOC: ");
144 Serial.print(CCS811.getTVOCPPB());
145 Serial.println("ppb");
146
147 } else {
148 Serial.println("Data is not ready!");
149 }
150 /*!
151 * @brief Set baseline
152 * @param get from getBaseline.ino
153 */
154 CCS811.writeBaseLine(0x447B);
155 //delay cannot be less than measurement cycle
156 delay(1000);
157
158 // Première ligne, normal
159
160 ssd1306_printFixed (0, 8, "Temp:", STYLE_NORMAL);
161 ssd1306_printFixed(56, 8, tempC , STYLE_BOLD);
162 ssd1306_printFixed (96, 8, "C", STYLE_NORMAL);
163 ssd1306_printFixed(0, 16,"RH: ", STYLE_NORMAL);
164 ssd1306_printFixed(56, 16, humC , STYLE_BOLD);
165 ssd1306_printFixed(96, 16,"%", STYLE_NORMAL);
166 ssd1306_printFixed(0, 24, "Pres: ", STYLE_NORMAL);
167 ssd1306_printFixed(56, 24, presC , STYLE_BOLD);
168 ssd1306_printFixed(96, 24, "hPa" , STYLE_NORMAL);
169
170
171
172 int CO2;
173 CO2 = map (CCS811.getCO2PPM(),400,6000,0, 120);
174
175 for (int position=angle; position < CO2 ; position++) {
176 ServoCO2.write(position);
177 Serial.println(position);
178 angle = position;
179 delay(20);
180 }
181 for (int position=angle ; position > CO2 ; position--) {
182 ServoCO2.write(position);
183 Serial.println(position);
184 angle = position;
185 delay(20);
186 }
187
188 int TVOC;
189 TVOC = map (CCS811.getTVOCPPB(),8000,0,0, 120);
190
191 for (int position=angle2; position < TVOC ; position++) {
192 ServoTVOC.write(position);
193 Serial.println(position);
194 angle2 = position;
195 delay(20);
196 }
197 for (int position=angle2 ; position > TVOC ; position--) {
198 ServoTVOC.write(position);
199 Serial.println(position);
200 angle2 = position;
201 delay(20);
202 }
203
204
205
206 if (hum > 40 && hum <50)
207 {
208 //Allumage rotatif des Leds 0 à 5 en bleu suivant valeur de délais
209
210 for( int i = 0; i < 12; i++){
211 leds[i] = CRGB::Green;
212 FastLED.show();
213 delay (60);
214 }
215 for( int i = 0; i < 12; i++){
216 leds[i] = CRGB::Black;
217 FastLED.show();
218 delay (20);
219 }
220 }
221 else {
222 //Allumage rotatif des Leds 6 à 11 en rouge suivant valeur de délais
223 for( int i = 0; i < 12; i++){
224 leds[i] = CRGB::Red;
225 FastLED.show();
226 delay (20);
227 }
228 }
229 // Extinction rotative des 12 Led suivant valeur de délais
230 for( int i = 0; i < 12; i++){
231 leds[i] = CRGB::Black;
232 FastLED.show();
233 delay (10);
234 }
235 }
Étape 5 - Support décoratif en bois
Étape 6 - Impression 3D
-Impression 3D de supports de servomoteur. STL récupéré sur Thingiverse.
- Impression 3D d'un dessin perso de bouton de potentiometre
Published
 Français
Français English
English Deutsch
Deutsch Español
Español Italiano
Italiano Português
Português