

| (17 révisions intermédiaires par le même utilisateur non affichées) | |||
| Ligne 29 : | Ligne 29 : | ||
1 x Servomoteur - SG90 | 1 x Servomoteur - SG90 | ||
| − | 2 x Cellule neopixel - WS2812B SMD</translate> | + | 2 x Cellule neopixel - WS2812B SMD |
| + | |||
| + | Jumpers M/F</translate> | ||
|Tools=<translate>- Découpeuse laser | |Tools=<translate>- Découpeuse laser | ||
| − | - Arduino IDE</translate> | + | - Arduino IDE |
| + | |||
| + | - Colle | ||
| + | |||
| + | <br /></translate> | ||
|Tuto_Attachments={{Tuto Attachments | |Tuto_Attachments={{Tuto Attachments | ||
|Attachment=Silent_Box_Montage.pdf | |Attachment=Silent_Box_Montage.pdf | ||
}}{{Tuto Attachments | }}{{Tuto Attachments | ||
| − | |Attachment= | + | |Attachment=Silent_Box_SilentboxTestServo.ino |
| + | }}{{Tuto Attachments | ||
| + | |Attachment=Silent_Box_silentbox_08042020.ino | ||
| + | }}{{Tuto Attachments | ||
| + | |Attachment=Silent_Box_SilentboxGlobaltest.ino | ||
| + | }}{{Tuto Attachments | ||
| + | |Attachment=Silent_Box_silentboxv3.pdf | ||
}} | }} | ||
}} | }} | ||
| Ligne 49 : | Ligne 61 : | ||
|Step_Title=<translate>Prendre connaissance du branchement</translate> | |Step_Title=<translate>Prendre connaissance du branchement</translate> | ||
|Step_Content=<translate>Vous trouverez le schéma du circuit ci-contre dans l'onglet Fichiers.</translate> | |Step_Content=<translate>Vous trouverez le schéma du circuit ci-contre dans l'onglet Fichiers.</translate> | ||
| − | |Step_Picture_00=Silent_Box_Capture_decran_2020-04-08_a_15.28.38.png | + | |Step_Picture_00=Silent_Box_IMG_9083.jpeg |
| − | |Step_Picture_01= | + | |Step_Picture_01=Silent_Box_Capture_decran_2020-04-08_a_15.28.38.png |
| + | }} | ||
| + | {{Tuto Step | ||
| + | |Step_Title=<translate>Calibrer le servomoteur</translate> | ||
| + | |Step_Content=<translate>Pour commencer branchez votre servomoteur seul comme indiqué sur le schéma de l'étape précédente. | ||
| + | |||
| + | |||
| + | Téléverser le code "SilentboxTestServo.ino", le servo devrait bouger à l'emplacement de la case 1 de la Silentbox (c'est à dire à 10°) | ||
| + | |||
| + | |||
| + | Une fois fait, vous pouvez débrancher l'Arduino ainsi que le servomoteur.</translate> | ||
| + | |Step_Picture_00=Silent_Box_Capture_decran_2020-04-10_a_16.36.32.png | ||
| + | |Step_Picture_01=Silent_Box_IMG_3081.JPG | ||
}} | }} | ||
{{Tuto Step | {{Tuto Step | ||
| − | |Step_Title=<translate>Découpage des pièces</translate> | + | |Step_Title=<translate>Découpage des pièces et premiers assemblages</translate> |
| − | |Step_Content=<translate>Découper les différentes à l'aide d'une découpeuse laser. Vous pourrez trouver les plans dans l'onglet "Fichiers". Attention cependant : ils ne conviennent que pour du bois de 5mm d'épaisseur.</translate> | + | |Step_Content=<translate>Découper les différentes à l'aide d'une découpeuse laser. Vous pourrez trouver les plans dans l'onglet "Fichiers". Attention cependant : ils ne conviennent que pour du bois de 5mm d'épaisseur. |
| + | |||
| + | |||
| + | Commencer par assembler et coller le panneau arrière et la façade sur son socle à l'aide de colle à bois. Inutile de coller la pièce de jonction, cela compliquera la calibration de la roue.</translate> | ||
|Step_Picture_00=Silent_Box_Montage-01-resize.png | |Step_Picture_00=Silent_Box_Montage-01-resize.png | ||
|Step_Picture_01=Silent_Box_IMG_9079.jpeg | |Step_Picture_01=Silent_Box_IMG_9079.jpeg | ||
| + | |Step_Picture_02=Silent_Box_FullSizeRender.jpg | ||
}} | }} | ||
{{Tuto Step | {{Tuto Step | ||
|Step_Title=<translate>Installation de la cellule néopixel</translate> | |Step_Title=<translate>Installation de la cellule néopixel</translate> | ||
| − | |Step_Content=<translate> | + | |Step_Content=<translate>Il vous faudra souder vos deux cellules Neopixel les unes à la suite des autres comme indiqué sur le schéma. Une fois raccordées les unes aux autres, elles sont prêtes à être branchées sur l'Arduino. |
| + | |||
| + | |||
| + | Les LEDs seront reliées sur la pin 5 de l'Arduino. Elles ont pour but de diffuser une lueur qui indiquera si le seuil de tolérance est dépassé ou non.</translate> | ||
|Step_Picture_00=Silent_Box_Insallation_neopixel.jpg | |Step_Picture_00=Silent_Box_Insallation_neopixel.jpg | ||
|Step_Picture_01=Silent_Box_Capture_decran_2020-04-08_a_17.31.59.png | |Step_Picture_01=Silent_Box_Capture_decran_2020-04-08_a_17.31.59.png | ||
| Ligne 67 : | Ligne 98 : | ||
{{Tuto Step | {{Tuto Step | ||
|Step_Title=<translate>Installation du micro</translate> | |Step_Title=<translate>Installation du micro</translate> | ||
| − | |Step_Content=<translate> | + | |Step_Content=<translate>Le trou pour l'emplacement du micro se situe sur la façade, en bas à gauche du Silentbox. Placer le micro dans le trou et visez le micro à la façade en bois. |
| + | |||
| + | |||
| + | Le micro sera relié à la pin A0 de l'Arduino.</translate> | ||
|Step_Picture_00=Silent_Box_Insallation_micro.jpg | |Step_Picture_00=Silent_Box_Insallation_micro.jpg | ||
|Step_Picture_01=Silent_Box_IMG_9086_schema.png | |Step_Picture_01=Silent_Box_IMG_9086_schema.png | ||
| − | |||
}} | }} | ||
{{Tuto Step | {{Tuto Step | ||
| − | |Step_Title=<translate> | + | |Step_Title=<translate>Préparer la roue</translate> |
| − | |Step_Content=<translate> | + | |Step_Content=<translate>Visser l'hélice en plastique du servomoteur au milieu de la roue au niveau du trou.</translate> |
| + | |Step_Picture_00=Silent_Box_IMG_9088.jpeg | ||
| + | |Step_Picture_01=Silent_Box_01001236_0.png | ||
| + | |Step_Picture_02=Silent_Box_roueA.jpg | ||
}} | }} | ||
{{Tuto Step | {{Tuto Step | ||
|Step_Title=<translate>Fixer la roue au servomoteur</translate> | |Step_Title=<translate>Fixer la roue au servomoteur</translate> | ||
| − | |Step_Content=<translate> | + | |Step_Content=<translate>Une fois fait, fixez le servomoteur à l'arrière de Silentbox (image1) dans le trou prévu à cet effet. Attention, l'axe du servomoteur doit bien être positionné en haut. |
| − | |Step_Picture_00= | + | |
| − | |Step_Picture_01= | + | |
| − | | | + | Ensuite, insérez la roue entre la façade et l'arrière de la silentbox (image2), |
| + | |||
| + | Faites en sorte que le cercle gravé de la roue (indiquant la case 1 de Silentbox) (image3) et le trou de la façade soit bien en face. | ||
| + | |||
| + | |||
| + | Une fois que les deux son alignés, clipser la roue au servomoteur. Enfin, posez Silentbox sur le dos et vissez la roue et le servo ensemble (au travers de la facade) (image4)</translate> | ||
| + | |Step_Picture_00=Silent_Box_ServoA.jpg | ||
| + | |Step_Picture_01=Silent_Box_IMG_3082.JPG | ||
| + | |Step_Picture_02=Silent_Box_roueC.jpg | ||
| + | |Step_Picture_03=Silent_Box_RoueB.jpg | ||
}} | }} | ||
{{Tuto Step | {{Tuto Step | ||
| − | |Step_Title=<translate> | + | |Step_Title=<translate>Reprenez le schéma et brancher le circuit !</translate> |
|Step_Content=<translate>Vérifiez bien que tout est raccordé à l'Arduino.</translate> | |Step_Content=<translate>Vérifiez bien que tout est raccordé à l'Arduino.</translate> | ||
| − | |Step_Picture_00=Silent_Box_ServoB.jpg | + | |Step_Picture_00=Silent_Box_Capture_decran_2020-04-08_a_15.28.38.png |
| + | |Step_Picture_01=Silent_Box_ServoB.jpg | ||
}} | }} | ||
{{Tuto Step | {{Tuto Step | ||
| − | |Step_Title=<translate>Téléverser le code</translate> | + | |Step_Title=<translate>Tester Silent Box pour bien le calibrer</translate> |
| − | |Step_Content=<translate>Vous n'avez plus qu'à téléverser le code dans Arduino.</translate> | + | |Step_Content=<translate>Afin de bien calibrer la rotation de la roue vous pouvez, tester le code : Silent_Box_SilentboxGlobaltest.ino |
| + | |||
| + | |||
| + | Téléverser le code dans Arduino pour voir la roue tourner sur l'ensemble des 5 palier de nuisance sonore. Le palier change alors tout les 5 secondes sans prendre en compte le micro. | ||
| + | |||
| + | Si l'un des palier est déaxé (en fonction du servomoteur) vous pouvez modifier les valeurs d'angle de chaque palier (de 1, 2 ou 3 degrés) (image 2), puis téléverser à nouveau pour voir le résultat. | ||
| + | |||
| + | |||
| + | Une fois que vous aurez un résultat satisfaisant, vous pourrez copier ces valeur dans le code final de la silentbox.</translate> | ||
| + | |Step_Picture_00=Petit_compteur_-_compteur_de_passages_à_horaires_programmables_illuencours.jpg | ||
| + | |Step_Picture_01=Silent_Box_Capture_decran_2020-04-10_a_16.46.31.png | ||
| + | |Step_Picture_01_annotation={"version":"2.4.6","objects":[{"type":"image","version":"2.4.6","originX":"left","originY":"top","left":0,"top":0,"width":800,"height":657,"fill":"rgb(0,0,0)","stroke":null,"strokeWidth":0,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":0.75,"scaleY":0.75,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"crossOrigin":"","cropX":0,"cropY":0,"src":"https://wikifab.org/images/thumb/6/69/Silent_Box_Capture_decran_2020-04-10_a_16.46.31.png/800px-Silent_Box_Capture_decran_2020-04-10_a_16.46.31.png","filters":[]},{"type":"wfarrow2line","version":"2.4.6","originX":"center","originY":"center","left":74.5,"top":215.5,"width":39,"height":33,"fill":"rgba(255,0,0,0)","stroke":"#FF0000","strokeWidth":4,"strokeDashArray":null,"strokeLineCap":"round","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"x1":-19.5,"x2":19.5,"y1":-16.5,"y2":16.5,"x2a":9.399812224347102,"y2a":-2.5259351122763922,"x2b":-0.9352636391116809,"y2b":9.688245453629442},{"type":"wfarrow2circle","version":"2.4.6","originX":"center","originY":"center","left":55,"top":199,"width":16,"height":16,"fill":"#aaa","stroke":"#666","strokeWidth":0,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":0.5,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"radius":8,"startAngle":0,"endAngle":6.283185307179586},{"type":"wfarrow2circle","version":"2.4.6","originX":"center","originY":"center","left":94,"top":232,"width":16,"height":16,"fill":"#aaa","stroke":"#666","strokeWidth":0,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":0.5,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"radius":8,"startAngle":0,"endAngle":6.283185307179586},{"type":"wfarrow2line","version":"2.4.6","originX":"center","originY":"center","left":80.5,"top":321,"width":39,"height":36,"fill":"rgba(255,0,0,0)","stroke":"#FF0000","strokeWidth":4,"strokeDashArray":null,"strokeLineCap":"round","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"x1":-19.5,"x2":19.5,"y1":-18,"y2":18,"x2a":10.230171929314768,"y2a":-1.444029611681219,"x2b":-0.6223097144142855,"y2b":10.312825502358589},{"type":"wfarrow2circle","version":"2.4.6","originX":"center","originY":"center","left":61,"top":303,"width":16,"height":16,"fill":"#aaa","stroke":"#666","strokeWidth":0,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":0.5,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"radius":8,"startAngle":0,"endAngle":6.283185307179586},{"type":"wfarrow2circle","version":"2.4.6","originX":"center","originY":"center","left":100,"top":339,"width":16,"height":16,"fill":"#aaa","stroke":"#666","strokeWidth":0,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":0,"flipX":false,"flipY":false,"opacity":0.5,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"radius":8,"startAngle":0,"endAngle":6.283185307179586},{"type":"textbox","version":"2.4.6","originX":"center","originY":"center","left":22.94,"top":197,"width":203.01,"height":22.6,"fill":"#FF0000","stroke":"#FF0000","strokeWidth":1,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":1,"scaleY":1,"angle":269.86,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"text":"Valeur à modifier","fontSize":20,"fontWeight":"normal","fontFamily":"sans-serif","fontStyle":"normal","lineHeight":1.16,"underline":false,"overline":false,"linethrough":false,"textAlign":"left","textBackgroundColor":"","charSpacing":0,"minWidth":20,"styles":{} }],"height":493,"width":600} | ||
| + | }} | ||
| + | {{Tuto Step | ||
| + | |Step_Title=<translate>Téléverser le code final</translate> | ||
| + | |Step_Content=<translate>Si besoin modifier les 5 valeurs d'angles pour les 5 palier de nuisance sonore dans le code final : Silent_Box_silentbox_08042020.ino | ||
| + | |||
| + | |||
| + | Vous n'avez plus qu'à téléverser le code dans Arduino pour faire fonctionner Silentbox.</translate> | ||
|Step_Picture_00=Silent_Box_Capture_decran_2020-04-08_a_16.30.56.png | |Step_Picture_00=Silent_Box_Capture_decran_2020-04-08_a_16.30.56.png | ||
| + | |Step_Picture_01=Petit_compteur_-_compteur_de_passages_à_horaires_programmables_illuencours.jpg | ||
}} | }} | ||
{{Notes | {{Notes | ||
| Ligne 102 : | Ligne 167 : | ||
}} | }} | ||
{{Tuto Status | {{Tuto Status | ||
| − | |Complete= | + | |Complete=Published |
}} | }} | ||
Version actuelle datée du 10 avril 2020 à 16:54
Silent Box est un projet de capteur sonore. Destiné à la médiation, il peut être utilisé dans des lieux afin de sensibiliser au bruit. L'objet se présente sous la forme d'une roue ornée de pictogrammes évoquant différents volumes sonores indicatifs. Elle pivote grâce à un micro interagissant avec un moteur et est pilotée par une carte Arduino.


Difficulté
Moyen
Durée
4 heure(s)
Catégories
Art, Bien-être & Santé, Musique & Sons
Coût
40 EUR (€)
Sommaire
- 1 Introduction
- 2 Video d'introduction
- 3 Étape 1 - Design de l'objet
- 4 Étape 2 - Prendre connaissance du branchement
- 5 Étape 3 - Calibrer le servomoteur
- 6 Étape 4 - Découpage des pièces et premiers assemblages
- 7 Étape 5 - Installation de la cellule néopixel
- 8 Étape 6 - Installation du micro
- 9 Étape 7 - Préparer la roue
- 10 Étape 8 - Fixer la roue au servomoteur
- 11 Étape 9 - Reprenez le schéma et brancher le circuit !
- 12 Étape 10 - Tester Silent Box pour bien le calibrer
- 13 Étape 11 - Téléverser le code final
- 14 Commentaires
Introduction
Ce projet a été réalisé dans le cadre d'un atelier à l'Edulab en partenariat avec la Maison de la Consommation et de l'Environnement. Dans un premier temps, une équipe s'est chargée d'imaginer le design, et l'autre de concevoir la partie électronique. L'idée a émergé de concevoir un objet pouvant être mobile ou accroché à un mur, d'où sa forme d'horloge. Le principal obstacle a été de pouvoir lisser le signal du micro, afin de retranscrire avec justesse le bruit ambiant et les réponses du moteur. Attention : certaines des photos viennent de la v1 de l'objet mais les fichiers et la photo ci dessus sont bien la v2, qui est la seule fonctionnelle.
Vimeo

Matériaux
1 x Contreplaqué Peuplier (ou autre bois) 5mm
1 x Arduino Uno
1 x Module microphone - MAX4466
1 x Servomoteur - SG90
2 x Cellule neopixel - WS2812B SMD
Jumpers M/F
Outils
- Découpeuse laser
- Arduino IDE
- Colle
Étape 1 - Design de l'objet
Lors du brainstorming sur le design, l'équipe s'est accordée sur un objet mobile en axant sur la circularité. L'objectif était d'afficher de manière claire les informations et notamment le seuil de tolérance sonore, tout en conservant un aspect ludique.



Étape 2 - Prendre connaissance du branchement
Vous trouverez le schéma du circuit ci-contre dans l'onglet Fichiers.


Étape 3 - Calibrer le servomoteur
Pour commencer branchez votre servomoteur seul comme indiqué sur le schéma de l'étape précédente.
Téléverser le code "SilentboxTestServo.ino", le servo devrait bouger à l'emplacement de la case 1 de la Silentbox (c'est à dire à 10°)
Une fois fait, vous pouvez débrancher l'Arduino ainsi que le servomoteur.


Étape 4 - Découpage des pièces et premiers assemblages
Découper les différentes à l'aide d'une découpeuse laser. Vous pourrez trouver les plans dans l'onglet "Fichiers". Attention cependant : ils ne conviennent que pour du bois de 5mm d'épaisseur.
Commencer par assembler et coller le panneau arrière et la façade sur son socle à l'aide de colle à bois. Inutile de coller la pièce de jonction, cela compliquera la calibration de la roue.



Étape 5 - Installation de la cellule néopixel
Il vous faudra souder vos deux cellules Neopixel les unes à la suite des autres comme indiqué sur le schéma. Une fois raccordées les unes aux autres, elles sont prêtes à être branchées sur l'Arduino.
Les LEDs seront reliées sur la pin 5 de l'Arduino. Elles ont pour but de diffuser une lueur qui indiquera si le seuil de tolérance est dépassé ou non.

Étape 6 - Installation du micro
Le trou pour l'emplacement du micro se situe sur la façade, en bas à gauche du Silentbox. Placer le micro dans le trou et visez le micro à la façade en bois.
Le micro sera relié à la pin A0 de l'Arduino.


Étape 7 - Préparer la roue
Visser l'hélice en plastique du servomoteur au milieu de la roue au niveau du trou.



Étape 8 - Fixer la roue au servomoteur
Une fois fait, fixez le servomoteur à l'arrière de Silentbox (image1) dans le trou prévu à cet effet. Attention, l'axe du servomoteur doit bien être positionné en haut.
Ensuite, insérez la roue entre la façade et l'arrière de la silentbox (image2),
Faites en sorte que le cercle gravé de la roue (indiquant la case 1 de Silentbox) (image3) et le trou de la façade soit bien en face.
Une fois que les deux son alignés, clipser la roue au servomoteur. Enfin, posez Silentbox sur le dos et vissez la roue et le servo ensemble (au travers de la facade) (image4)




Étape 9 - Reprenez le schéma et brancher le circuit !
Vérifiez bien que tout est raccordé à l'Arduino.

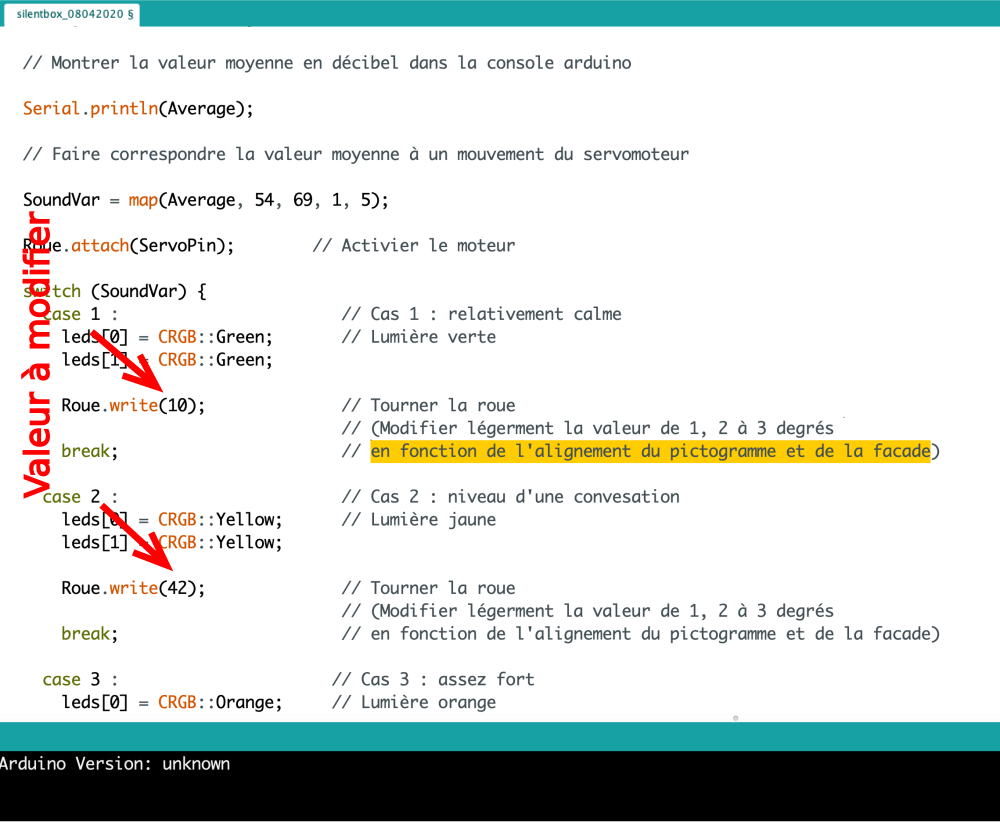
Étape 10 - Tester Silent Box pour bien le calibrer
Afin de bien calibrer la rotation de la roue vous pouvez, tester le code : Silent_Box_SilentboxGlobaltest.ino
Téléverser le code dans Arduino pour voir la roue tourner sur l'ensemble des 5 palier de nuisance sonore. Le palier change alors tout les 5 secondes sans prendre en compte le micro.
Si l'un des palier est déaxé (en fonction du servomoteur) vous pouvez modifier les valeurs d'angle de chaque palier (de 1, 2 ou 3 degrés) (image 2), puis téléverser à nouveau pour voir le résultat.
Une fois que vous aurez un résultat satisfaisant, vous pourrez copier ces valeur dans le code final de la silentbox.

Étape 11 - Téléverser le code final
Si besoin modifier les 5 valeurs d'angles pour les 5 palier de nuisance sonore dans le code final : Silent_Box_silentbox_08042020.ino
Vous n'avez plus qu'à téléverser le code dans Arduino pour faire fonctionner Silentbox.

Published
 Français
Français English
English Deutsch
Deutsch Español
Español Italiano
Italiano Português
Português