


(Page créée avec « {{ {{tntn|Tuto Details}} |SourceLanguage=none |Language=fr |IsTranslation=0 |Main_Picture=TomBot_tambot_pp.png |Licences=Attribution (CC BY) |Description=<translate>Instru... ») |
|||
| (6 révisions intermédiaires par 3 utilisateurs non affichées) | |||
| Ligne 1 : | Ligne 1 : | ||
| − | {{ | + | {{Tuto Details |
| − | |||
| − | |||
| − | |||
|Main_Picture=TomBot_tambot_pp.png | |Main_Picture=TomBot_tambot_pp.png | ||
| − | + | |Description=<translate><!--T:1--> | |
| − | |Description=<translate> | + | Un tambour motorisé avec Arduino.</translate> |
|Area=Art, Electronics, Music and Sound, Play and Hobbies, Robotics | |Area=Art, Electronics, Music and Sound, Play and Hobbies, Robotics | ||
|Type=Creation | |Type=Creation | ||
| Ligne 11 : | Ligne 8 : | ||
|Duration=6 | |Duration=6 | ||
|Duration-type=hour(s) | |Duration-type=hour(s) | ||
| − | |Cost= | + | |Cost=30 |
|Currency=EUR (€) | |Currency=EUR (€) | ||
| − | |Tags=TomBot, tambour, batterie, musique, Instrument du musique, Percussion | + | |Tags=TomBot, tambour, batterie, musique, Instrument du musique, Percussion, Arduino, découpe laser, Bois, Electronics, électronique |
| + | |SourceLanguage=none | ||
| + | |Language=fr | ||
| + | |IsTranslation=0 | ||
}} | }} | ||
| − | {{ | + | {{Introduction |
| − | |Introduction=<translate>Le TomBot est un instrument de musique motorisé composé d'un unique bras venant frapper un petit tambour. Il est possible de composer sa propre séquence rythmique et de le faire jouer seul ou en groupe. | + | |Introduction=<translate><!--T:2--> |
| + | Le TomBot est un instrument de musique motorisé composé d'un unique bras venant frapper un petit tambour. Il est possible de composer sa propre séquence rythmique et de le faire jouer seul ou en groupe. | ||
| + | <!--T:3--> | ||
Cette version 1 peut être alimentée de manière autonome, via une pile 9 volt. Dans ce cas, un interrupteur permet d'allumer et éteindre le boitier. | Cette version 1 peut être alimentée de manière autonome, via une pile 9 volt. Dans ce cas, un interrupteur permet d'allumer et éteindre le boitier. | ||
| − | La version 2 (à venir) | + | <!--T:4--> |
| + | La version 2 (à venir) comprend un potentiomètre (qui permet de changer le tempo de la séquence) ainsi qu'un bouton poussoir (qui permet de jouer une deuxième séquence). | ||
| + | <!--T:5--> | ||
Le TomBot a été créé lors d'une résidence d'artiste à l'école Champion de Cicé à Rennes, en partenariat avec le Bon Accueil. Une trentaine de TomBots ont été créé à cette occasion avec une soixantaine d'enfants. Ork.2 est l'ensemble composé par ces instruments de musique motorisés. A l'issue de cette résidence, Ork.2 a été utilisé lors d'un concert à l'Antipode à Rennes par le groupe de musique électronique Leska, pour la restitution d'une résidence menée également par le groupe dans cette école.</translate> | Le TomBot a été créé lors d'une résidence d'artiste à l'école Champion de Cicé à Rennes, en partenariat avec le Bon Accueil. Une trentaine de TomBots ont été créé à cette occasion avec une soixantaine d'enfants. Ork.2 est l'ensemble composé par ces instruments de musique motorisés. A l'issue de cette résidence, Ork.2 a été utilisé lors d'un concert à l'Antipode à Rennes par le groupe de musique électronique Leska, pour la restitution d'une résidence menée également par le groupe dans cette école.</translate> | ||
}} | }} | ||
| − | {{ {{ | + | {{Materials |
| − | | | + | |Tuto_Attachments={{Tuto Attachments |
| − | + | |Attachment=Tombot lasercut.svg | |
| + | }}{{Tuto Attachments | ||
| + | |Attachment=Tombot 3Dprint.stl | ||
}} | }} | ||
| − | + | |Material=<translate><!--T:6--> | |
| − | |Material=<translate>* 1 planche de contreplaqué peuplier 5mm de 80*60 mm | + | * 1 planche de contreplaqué peuplier 5mm de 80*60 mm |
* 1 bobine de PLA | * 1 bobine de PLA | ||
* Quelques élastiques ou de la colle à bois | * Quelques élastiques ou de la colle à bois | ||
| Ligne 43 : | Ligne 49 : | ||
* 1 breaboard | * 1 breaboard | ||
* 1 rouleau de scotch "barnier"</translate> | * 1 rouleau de scotch "barnier"</translate> | ||
| − | |Tools=<translate>* Une imprimante 3D | + | |Tools=<translate><!--T:7--> |
| + | * Une imprimante 3D | ||
* Une découpeuse laser | * Une découpeuse laser | ||
* Un fer à souder | * Un fer à souder | ||
| Ligne 50 : | Ligne 57 : | ||
* Une paire de ciseaux</translate> | * Une paire de ciseaux</translate> | ||
}} | }} | ||
| − | {{ | + | {{Tuto Step |
| − | + | |Step_Title=<translate><!--T:8--> | |
| − | |Step_Title=<translate>Montage électronique</translate> | + | Montage électronique</translate> |
| − | |Step_Content=<translate>- Imprimer les pièces en 3D selon la pièce jointe tombot_3Dprint.stl. | + | |Step_Content=<translate><!--T:9--> |
| + | - Imprimer les pièces en 3D selon la pièce jointe tombot_3Dprint.stl. | ||
| + | <!--T:10--> | ||
- Monter le servomoteur sur son support imprimé en 3D et visser le dessus à l'aide des vis fournis avec le moteur (figure1). | - Monter le servomoteur sur son support imprimé en 3D et visser le dessus à l'aide des vis fournis avec le moteur (figure1). | ||
| + | <!--T:11--> | ||
- Monter le bras/baguette imprimé en 3D en faisant attention à ce qu'il soit bien à la position zéro et le visser (figure 1). | - Monter le bras/baguette imprimé en 3D en faisant attention à ce qu'il soit bien à la position zéro et le visser (figure 1). | ||
| + | <!--T:12--> | ||
- Encastrer l'Arduino sur la breaboard de manière à ce qu'elle soit à peu près au milieu (figure 2). | - Encastrer l'Arduino sur la breaboard de manière à ce qu'elle soit à peu près au milieu (figure 2). | ||
| + | <!--T:13--> | ||
- Connecter les 3 jumpers aux trois broches du servomoteurs (figure 3). | - Connecter les 3 jumpers aux trois broches du servomoteurs (figure 3). | ||
| + | <!--T:14--> | ||
- Brancher le fil orange du servomoteur sur la sortie DIGITAL 3, le fil rouge sur le +5V et le marron sur l'un des GND (figure 4 et 5).</translate> | - Brancher le fil orange du servomoteur sur la sortie DIGITAL 3, le fil rouge sur le +5V et le marron sur l'un des GND (figure 4 et 5).</translate> | ||
|Step_Picture_00=TomBot_medium_project_step_image_1.png | |Step_Picture_00=TomBot_medium_project_step_image_1.png | ||
| Ligne 70 : | Ligne 83 : | ||
|Step_Picture_03=TomBot_medium_project_step_image_4.png | |Step_Picture_03=TomBot_medium_project_step_image_4.png | ||
|Step_Picture_04=TomBot_medium_project_step_image_5.png | |Step_Picture_04=TomBot_medium_project_step_image_5.png | ||
| + | |Step_Picture_05=TomBot__uploads_project_cao_462_tombot_3Dprint.stl | ||
}} | }} | ||
| − | {{ | + | {{Tuto Step |
| − | |Step_Title=<translate>Soudure</translate> | + | |Step_Title=<translate><!--T:15--> |
| − | |Step_Content=<translate>- Souder deux jumpers aux deux pattes argentées (un par patte) de l'interrupteur. Attention, la dorée est pour la LED (figure 6). | + | Soudure</translate> |
| + | |Step_Content=<translate><!--T:16--> | ||
| + | - Souder deux jumpers aux deux pattes argentées (un par patte) de l'interrupteur. Attention, la dorée est pour la LED (figure 6). | ||
| + | <!--T:17--> | ||
- Souder l'un des fils de l'interrupteur au fil noir du support de pile 9v (figure 6). | - Souder l'un des fils de l'interrupteur au fil noir du support de pile 9v (figure 6). | ||
| + | <!--T:18--> | ||
- Souder un troisième jumper au fil rouge du support de pile 9v (figure 6). | - Souder un troisième jumper au fil rouge du support de pile 9v (figure 6). | ||
| + | <!--T:19--> | ||
- Connecter le jumper de l'interrupteur libre à l'un des GND de l'Arduino et celui du support de pile à VIN (figure 7 et 8). | - Connecter le jumper de l'interrupteur libre à l'un des GND de l'Arduino et celui du support de pile à VIN (figure 7 et 8). | ||
| + | <!--T:20--> | ||
- Brancher la pile 9v et mettre l'interrupteur sur la position on. Vérifier que les LEDs de l'Arduino s'allument bien et éteindre l'interrupteur.</translate> | - Brancher la pile 9v et mettre l'interrupteur sur la position on. Vérifier que les LEDs de l'Arduino s'allument bien et éteindre l'interrupteur.</translate> | ||
|Step_Picture_00=TomBot_medium_project_step_image_9.png | |Step_Picture_00=TomBot_medium_project_step_image_9.png | ||
| Ligne 86 : | Ligne 106 : | ||
|Step_Picture_02=TomBot_medium_project_step_image_8.png | |Step_Picture_02=TomBot_medium_project_step_image_8.png | ||
}} | }} | ||
| − | {{ | + | {{Tuto Step |
| − | |Step_Title=<translate>Code - Mblock</translate> | + | |Step_Title=<translate><!--T:21--> |
| − | |Step_Content=<translate>- Reproduire le code mblock (figure 9). | + | Code - Mblock</translate> |
| + | |Step_Content=<translate><!--T:22--> | ||
| + | - Reproduire le code mblock (figure 9). | ||
| + | <!--T:23--> | ||
- Changer les valeurs des boîtes vertes "tempo/1" pour diviser le temps. Exemple de divisions binaires du temps : 1, 2, 4, 8, 16, 32. Plus la valeur sera élevée et plus le rythme sera rapide (figure 9). | - Changer les valeurs des boîtes vertes "tempo/1" pour diviser le temps. Exemple de divisions binaires du temps : 1, 2, 4, 8, 16, 32. Plus la valeur sera élevée et plus le rythme sera rapide (figure 9). | ||
| + | <!--T:24--> | ||
- Connecter l'Arduino en USB à l'ordinateur. | - Connecter l'Arduino en USB à l'ordinateur. | ||
| + | <!--T:25--> | ||
- Connecter par port série via mblock selon la figure 1 (figure 9). | - Connecter par port série via mblock selon la figure 1 (figure 9). | ||
| + | <!--T:26--> | ||
- Cliquer sur la boite "arduino générer le code" pour faire apparaître le code arduino et le bouton "téléverser dans l'arduino" selon la figure 1 (figure 9). | - Cliquer sur la boite "arduino générer le code" pour faire apparaître le code arduino et le bouton "téléverser dans l'arduino" selon la figure 1 (figure 9). | ||
| + | <!--T:27--> | ||
- Cliquer sur téléverser dans l'Arduino (figure 10). | - Cliquer sur téléverser dans l'Arduino (figure 10). | ||
| + | <!--T:28--> | ||
- Débrancher le câble USB et tester avec la pile 9v en activant l'interrupteur.</translate> | - Débrancher le câble USB et tester avec la pile 9v en activant l'interrupteur.</translate> | ||
|Step_Picture_00=TomBot_medium_project_step_image_mbock.png | |Step_Picture_00=TomBot_medium_project_step_image_mbock.png | ||
|Step_Picture_01=TomBot_medium_project_step_image_mblock.png | |Step_Picture_01=TomBot_medium_project_step_image_mblock.png | ||
}} | }} | ||
| − | {{ | + | {{Tuto Step |
| − | |Step_Title=<translate>Création du | + | |Step_Title=<translate><!--T:29--> |
| − | |Step_Content=<translate>- Découper les parois du | + | Création du boîtier au laser</translate> |
| + | |Step_Content=<translate><!--T:30--> | ||
| + | - Découper les parois du boîtier au laser selon la pièce jointe tombot_lasercut.svg | ||
| + | <!--T:31--> | ||
- Avant d'assembler la boite, coller la breadboard contenant l'Arduino et son montage sur l'une des parois les plus larges. (figure 11). | - Avant d'assembler la boite, coller la breadboard contenant l'Arduino et son montage sur l'une des parois les plus larges. (figure 11). | ||
| + | <!--T:32--> | ||
{{Warning|Faire bien attention à présenter le port USB vers l'extérieur de la boîte.}}</translate> | {{Warning|Faire bien attention à présenter le port USB vers l'extérieur de la boîte.}}</translate> | ||
|Step_Picture_00=TomBot_medium_project_step_image_21.png | |Step_Picture_00=TomBot_medium_project_step_image_21.png | ||
}} | }} | ||
| − | {{ | + | {{Tuto Step |
| − | |Step_Title=<translate>Assemblage du boîtier</translate> | + | |Step_Title=<translate><!--T:33--> |
| − | |Step_Content=<translate>- Débrancher le servomoteur pour le faire passer par l'un des trous d'une planche puis le rebrancher comme précédemment (figure 12). | + | Assemblage du boîtier</translate> |
| + | |Step_Content=<translate><!--T:34--> | ||
| + | - Débrancher le servomoteur pour le faire passer par l'un des trous d'une planche puis le rebrancher comme précédemment (figure 12). | ||
| + | <!--T:35--> | ||
- Visser le servomoteur à l'aide de la vis imprimées précédemment en 3D sur la planche de votre choix. Plusieurs solutions sont possibles selon votre montage. Se fier aux photos si vous voulez reproduire l'original (figure 13). | - Visser le servomoteur à l'aide de la vis imprimées précédemment en 3D sur la planche de votre choix. Plusieurs solutions sont possibles selon votre montage. Se fier aux photos si vous voulez reproduire l'original (figure 13). | ||
| + | <!--T:36--> | ||
- Débrancher l'interrupteur et l'encastrer dans le trou du milieu de la planche, puis rebrancher les fils comme précédemment (figure 8). | - Débrancher l'interrupteur et l'encastrer dans le trou du milieu de la planche, puis rebrancher les fils comme précédemment (figure 8). | ||
| + | <!--T:37--> | ||
- Visser la pince précédemment imprimée sur l'une des planches de votre choix (figure 14). | - Visser la pince précédemment imprimée sur l'une des planches de votre choix (figure 14). | ||
| + | <!--T:38--> | ||
- Assembler la boîte. Insérer la pile avant de refermer. Faire tenir le tout avec des élastiques. (figure 15). | - Assembler la boîte. Insérer la pile avant de refermer. Faire tenir le tout avec des élastiques. (figure 15). | ||
| + | <!--T:39--> | ||
{{Idea|Pour une solution plus durable, penser à appliquer de la colle à bois sur les arrêtes, ce qui devrait suffire pour faire tenir l'ensemble.}}</translate> | {{Idea|Pour une solution plus durable, penser à appliquer de la colle à bois sur les arrêtes, ce qui devrait suffire pour faire tenir l'ensemble.}}</translate> | ||
|Step_Picture_00=TomBot_medium_project_step_image_11.png | |Step_Picture_00=TomBot_medium_project_step_image_11.png | ||
| Ligne 131 : | Ligne 170 : | ||
|Step_Picture_03=TomBot_medium_project_step_image_22.png | |Step_Picture_03=TomBot_medium_project_step_image_22.png | ||
}} | }} | ||
| − | {{ | + | {{Tuto Step |
| − | |Step_Title=<translate>Montage du tambour - la peau</translate> | + | |Step_Title=<translate><!--T:40--> |
| − | |Step_Content=<translate>- Percer 3 trous du diamètre des vis sur le tube de manière à ce qu'ils forment un triangle : deux d'entre eux bien en face l'un de l'autre et le troisième entre les deux (figure 16). | + | Montage du tambour - la peau</translate> |
| + | |Step_Content=<translate><!--T:41--> | ||
| + | - Percer 3 trous du diamètre des vis sur le tube de manière à ce qu'ils forment un triangle : deux d'entre eux bien en face l'un de l'autre et le troisième entre les deux (figure 16). | ||
| + | <!--T:42--> | ||
- Couper la base du ballon de baudruche au deux tiers (figure 17). | - Couper la base du ballon de baudruche au deux tiers (figure 17). | ||
| + | <!--T:43--> | ||
- Bien tendre le ballon sur le tube. Le ballon doit être bien tendu pour résonner. Ne pas hésiter à recommencer l'opération pour que ce soit le cas. C'est pas facile mais on y arrive de mieux en mieux avec le temps (figure 18) ! | - Bien tendre le ballon sur le tube. Le ballon doit être bien tendu pour résonner. Ne pas hésiter à recommencer l'opération pour que ce soit le cas. C'est pas facile mais on y arrive de mieux en mieux avec le temps (figure 18) ! | ||
| + | <!--T:44--> | ||
- Dès que la peau est bien mise, enrouler à la base avec un long bout de scotch "barnier". Cela ne devrait plus bouger mais attention à ne pas frotter la peau sur une surface, c'est fragile (figure 19).</translate> | - Dès que la peau est bien mise, enrouler à la base avec un long bout de scotch "barnier". Cela ne devrait plus bouger mais attention à ne pas frotter la peau sur une surface, c'est fragile (figure 19).</translate> | ||
|Step_Picture_00=TomBot_medium_project_step_image_16.png | |Step_Picture_00=TomBot_medium_project_step_image_16.png | ||
| Ligne 145 : | Ligne 189 : | ||
|Step_Picture_03=TomBot_medium_project_step_image_19.png | |Step_Picture_03=TomBot_medium_project_step_image_19.png | ||
}} | }} | ||
| − | {{ | + | {{Tuto Step |
| − | |Step_Title=<translate>Montage du tambour - le support</translate> | + | |Step_Title=<translate><!--T:45--> |
| − | |Step_Content=<translate>- Visser les quatre pieds deux par deux sur les côté du tube selon les trous percés. Il est possible d'utiliser les trous des pieds différemment selon ses envies mais il faut prendre bien soin de faire pareil des ceux côtés. (figure 20, 21 et 22) | + | Montage du tambour - le support</translate> |
| + | |Step_Content=<translate><!--T:46--> | ||
| + | - Visser les quatre pieds deux par deux sur les côté du tube selon les trous percés. Il est possible d'utiliser les trous des pieds différemment selon ses envies mais il faut prendre bien soin de faire pareil des ceux côtés. (figure 20, 21 et 22) | ||
| + | <!--T:47--> | ||
{{Warning|Attention à bien serrer, mais pas trop fort non plus : n'oublions pas que ce sont des vis en plastiques !}} | {{Warning|Attention à bien serrer, mais pas trop fort non plus : n'oublions pas que ce sont des vis en plastiques !}} | ||
| − | - Visser le | + | <!--T:48--> |
| + | - Visser le boîtier par sa pince sur le dernier trou du tube. Encore une fois, attention au serrage. (figure 23 et 24) | ||
| + | <!--T:49--> | ||
- Allumer l'interrupteur pour tester. Ne pas hésiter à repositionner la baguette si celle-ci venait à taper dans le vide ou trop sur profondément dans la peau.</translate> | - Allumer l'interrupteur pour tester. Ne pas hésiter à repositionner la baguette si celle-ci venait à taper dans le vide ou trop sur profondément dans la peau.</translate> | ||
|Step_Picture_00=TomBot_medium_project_step_image_20.png | |Step_Picture_00=TomBot_medium_project_step_image_20.png | ||
| Ligne 159 : | Ligne 208 : | ||
|Step_Picture_03=TomBot_medium_project_step_image_24.png | |Step_Picture_03=TomBot_medium_project_step_image_24.png | ||
}} | }} | ||
| − | {{ | + | {{Tuto Step |
| − | |Step_Title=<translate>Résultat final</translate> | + | |Step_Title=<translate><!--T:50--> |
| − | |Step_Content=<translate></translate> | + | Résultat final</translate> |
| + | |Step_Content=<translate><!--T:54--> | ||
| + | En piste !</translate> | ||
|Step_Picture_00=TomBot_medium_project_step_image_27.jpg | |Step_Picture_00=TomBot_medium_project_step_image_27.jpg | ||
|Step_Picture_01=TomBot_medium_project_step_image_31.jpg | |Step_Picture_01=TomBot_medium_project_step_image_31.jpg | ||
|Step_Picture_02=TomBot_medium_project_step_image_30.jpg | |Step_Picture_02=TomBot_medium_project_step_image_30.jpg | ||
| + | |Step_Picture_03=TomBot_medium_project_step_image_28.jpg | ||
}} | }} | ||
| − | {{ | + | {{Notes |
| − | |Notes=<translate>Ork.2 fait suite à Ork.1, premier orchestre d'instruments de musique motorisés utilisé lors d'installations ou performances artistiques. | + | |Notes=<translate><!--T:51--> |
| + | Ork.2 fait suite à Ork.1, premier orchestre d'instruments de musique motorisés utilisé lors d'installations ou performances artistiques. | ||
| + | <!--T:52--> | ||
http://alexandreberthaud.com/portfolio/playing-with-machines/ | http://alexandreberthaud.com/portfolio/playing-with-machines/ | ||
| + | <!--T:53--> | ||
http://alexandreberthaud.com/portfolio/ork-1-septuor-pour-corps-en-mouvement/</translate> | http://alexandreberthaud.com/portfolio/ork-1-septuor-pour-corps-en-mouvement/</translate> | ||
}} | }} | ||
| − | {{ {{ | + | {{PageLang |
| + | }} | ||
| + | {{Tuto Status | ||
|Complete=Published | |Complete=Published | ||
}} | }} | ||
| + | {{Separator}} | ||
Version actuelle datée du 17 août 2021 à 10:57
Un tambour motorisé avec Arduino.

Difficulté
Moyen
Durée
6 heure(s)
Catégories
Art, Électronique, Musique & Sons, Jeux & Loisirs, Robotique
Coût
30 EUR (€)
Sommaire
- 1 Introduction
- 2 Étape 1 - Montage électronique
- 3 Étape 2 - Soudure
- 4 Étape 3 - Code - Mblock
- 5 Étape 4 - Création du boîtier au laser
- 6 Étape 5 - Assemblage du boîtier
- 7 Étape 6 - Montage du tambour - la peau
- 8 Étape 7 - Montage du tambour - le support
- 9 Étape 8 - Résultat final
- 10 Notes et références
- 11 Commentaires
Introduction
Le TomBot est un instrument de musique motorisé composé d'un unique bras venant frapper un petit tambour. Il est possible de composer sa propre séquence rythmique et de le faire jouer seul ou en groupe.
Cette version 1 peut être alimentée de manière autonome, via une pile 9 volt. Dans ce cas, un interrupteur permet d'allumer et éteindre le boitier.
La version 2 (à venir) comprend un potentiomètre (qui permet de changer le tempo de la séquence) ainsi qu'un bouton poussoir (qui permet de jouer une deuxième séquence).
Le TomBot a été créé lors d'une résidence d'artiste à l'école Champion de Cicé à Rennes, en partenariat avec le Bon Accueil. Une trentaine de TomBots ont été créé à cette occasion avec une soixantaine d'enfants. Ork.2 est l'ensemble composé par ces instruments de musique motorisés. A l'issue de cette résidence, Ork.2 a été utilisé lors d'un concert à l'Antipode à Rennes par le groupe de musique électronique Leska, pour la restitution d'une résidence menée également par le groupe dans cette école.
Matériaux
- 1 planche de contreplaqué peuplier 5mm de 80*60 mm
- 1 bobine de PLA
- Quelques élastiques ou de la colle à bois
- 1 pile 9volt
- 1 support de pile 9v
- 1 ballon de baudruche
- 1 tube en pvc d'environ 120 mm de diamètre
- 1 servomoteur 9g type sg90
- 1 arduino nano
- 1 interrupteur
- 1 câble usb
- 5 jumpers mâle - mâle
- 1 breaboard
- 1 rouleau de scotch "barnier"
Outils
- Une imprimante 3D
- Une découpeuse laser
- Un fer à souder
- Une perceuse avec un gros foret ou une fraise
- Une pince multiple
- Une paire de ciseaux
Étape 1 - Montage électronique
- Imprimer les pièces en 3D selon la pièce jointe tombot_3Dprint.stl.
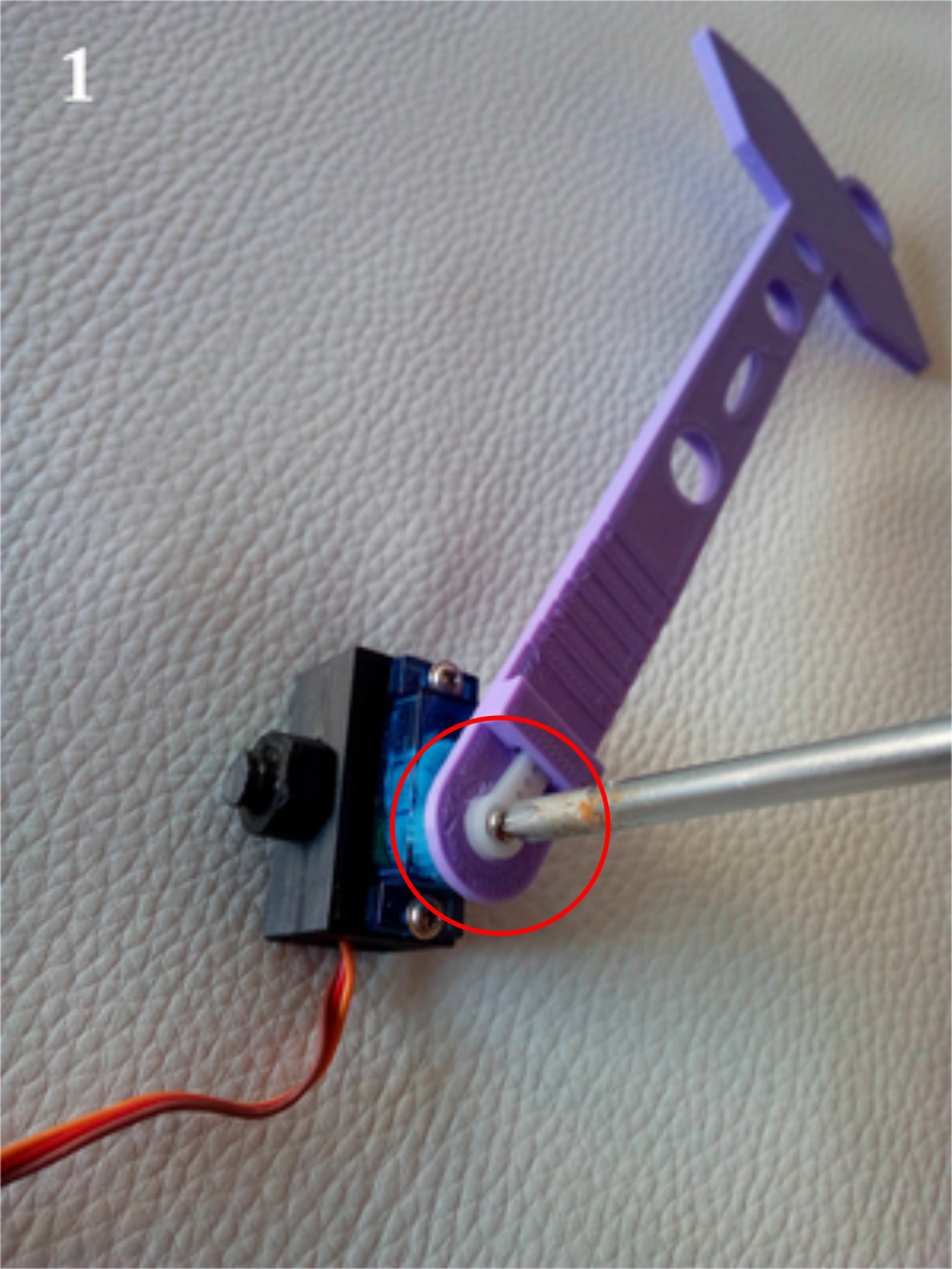
- Monter le servomoteur sur son support imprimé en 3D et visser le dessus à l'aide des vis fournis avec le moteur (figure1).
- Monter le bras/baguette imprimé en 3D en faisant attention à ce qu'il soit bien à la position zéro et le visser (figure 1).
- Encastrer l'Arduino sur la breaboard de manière à ce qu'elle soit à peu près au milieu (figure 2).
- Connecter les 3 jumpers aux trois broches du servomoteurs (figure 3).
- Brancher le fil orange du servomoteur sur la sortie DIGITAL 3, le fil rouge sur le +5V et le marron sur l'un des GND (figure 4 et 5).




Erreur lors de la création de la miniature : module.js:681 return process.dlopen(module, path._makeLong(filename)); ^ Error: libpng12.so.0: cannot open shared object file: No such file or directory at Object.Module._extensions..node (module.js:681:18) at Module.load (module.js:565:32) at tryModuleLoad (module.js:505:12) at Function.Module._load (module.js:497:3) at Module.require (module.js:596:17) at require (internal/module.js:11:18) at Object.<anonymous> (/var/www/dokitfarm/mw/dokit-1.22.0/lib/3d2png/node_modules/canvas/lib/bindings.js:3:18) at Module._compile (module.js:652:30) at Object.Module._extensions..js (module.js:663:10) at Module.load (module.js:565:32)
Étape 2 - Soudure
- Souder deux jumpers aux deux pattes argentées (un par patte) de l'interrupteur. Attention, la dorée est pour la LED (figure 6).
- Souder l'un des fils de l'interrupteur au fil noir du support de pile 9v (figure 6).
- Souder un troisième jumper au fil rouge du support de pile 9v (figure 6).
- Connecter le jumper de l'interrupteur libre à l'un des GND de l'Arduino et celui du support de pile à VIN (figure 7 et 8).
- Brancher la pile 9v et mettre l'interrupteur sur la position on. Vérifier que les LEDs de l'Arduino s'allument bien et éteindre l'interrupteur.



Étape 3 - Code - Mblock
- Reproduire le code mblock (figure 9).
- Changer les valeurs des boîtes vertes "tempo/1" pour diviser le temps. Exemple de divisions binaires du temps : 1, 2, 4, 8, 16, 32. Plus la valeur sera élevée et plus le rythme sera rapide (figure 9).
- Connecter l'Arduino en USB à l'ordinateur.
- Connecter par port série via mblock selon la figure 1 (figure 9).
- Cliquer sur la boite "arduino générer le code" pour faire apparaître le code arduino et le bouton "téléverser dans l'arduino" selon la figure 1 (figure 9).
- Cliquer sur téléverser dans l'Arduino (figure 10).
- Débrancher le câble USB et tester avec la pile 9v en activant l'interrupteur.


Étape 4 - Création du boîtier au laser
- Découper les parois du boîtier au laser selon la pièce jointe tombot_lasercut.svg
- Avant d'assembler la boite, coller la breadboard contenant l'Arduino et son montage sur l'une des parois les plus larges. (figure 11).

Étape 5 - Assemblage du boîtier
- Débrancher le servomoteur pour le faire passer par l'un des trous d'une planche puis le rebrancher comme précédemment (figure 12).
- Visser le servomoteur à l'aide de la vis imprimées précédemment en 3D sur la planche de votre choix. Plusieurs solutions sont possibles selon votre montage. Se fier aux photos si vous voulez reproduire l'original (figure 13).
- Débrancher l'interrupteur et l'encastrer dans le trou du milieu de la planche, puis rebrancher les fils comme précédemment (figure 8).
- Visser la pince précédemment imprimée sur l'une des planches de votre choix (figure 14).
- Assembler la boîte. Insérer la pile avant de refermer. Faire tenir le tout avec des élastiques. (figure 15).




Étape 6 - Montage du tambour - la peau
- Percer 3 trous du diamètre des vis sur le tube de manière à ce qu'ils forment un triangle : deux d'entre eux bien en face l'un de l'autre et le troisième entre les deux (figure 16).
- Couper la base du ballon de baudruche au deux tiers (figure 17).
- Bien tendre le ballon sur le tube. Le ballon doit être bien tendu pour résonner. Ne pas hésiter à recommencer l'opération pour que ce soit le cas. C'est pas facile mais on y arrive de mieux en mieux avec le temps (figure 18) !
- Dès que la peau est bien mise, enrouler à la base avec un long bout de scotch "barnier". Cela ne devrait plus bouger mais attention à ne pas frotter la peau sur une surface, c'est fragile (figure 19).




Étape 7 - Montage du tambour - le support
- Visser les quatre pieds deux par deux sur les côté du tube selon les trous percés. Il est possible d'utiliser les trous des pieds différemment selon ses envies mais il faut prendre bien soin de faire pareil des ceux côtés. (figure 20, 21 et 22)
- Visser le boîtier par sa pince sur le dernier trou du tube. Encore une fois, attention au serrage. (figure 23 et 24)
- Allumer l'interrupteur pour tester. Ne pas hésiter à repositionner la baguette si celle-ci venait à taper dans le vide ou trop sur profondément dans la peau.




Étape 8 - Résultat final
En piste !




Notes et références
Ork.2 fait suite à Ork.1, premier orchestre d'instruments de musique motorisés utilisé lors d'installations ou performances artistiques.
http://alexandreberthaud.com/portfolio/playing-with-machines/
http://alexandreberthaud.com/portfolio/ork-1-septuor-pour-corps-en-mouvement/
Published
 Français
Français English
English Deutsch
Deutsch Español
Español Italiano
Italiano Português
Português{kind=link}