



Vos dernières discussions
0 Réponse(s)
Bravo !
Merci pour cette idée fort poétique servie par un beau texte et de beaux dessins !
Cordialement.
0 Réponse(s)
Et en plus la description profite parfaitement du format de tuto Wikifab ! J’espère que d’autres fablabs utiliseront aussi Wikifab pour partager leurs réalisations…
2 Réponse(s)
Bonjour,
J'aimerais réaliser le même projet, ne connaissant rien en programmation électronique je voulais savoir
s'il est possible de me partager votre logiciel et code arduino?
Je suis preneur de toute information pour apprendre.
Est-il aussi possible d'éviter un obstacle, arbre?
Valentin
1 Réponse(s)
Bonjour
Franchement, Félicitations a OCCITAN
Je suis moi aussi sur un projet de fauchage d'herbe. Et comme tout le monde , j'ai une problématique différente.
car le terrain a couper a parfois des pentes de 100%.
Ce n'est pas un grand souci pour moi car je travaille dans la mécanique et je possède un tour, une fraiseuse, une imprimante 3D .. etc , pour concevoir et fabriquer la partie mécanique de cet engin.
J'ai opté pour une mécanique 4 roues motrices. les moteurs de chaque coté tournent ensemble et la machine tourne à la manière d'un tank (d'ailleurs la possibilité de chenilles sur un châssis fixe est envisageable sur ma machine..)
La hauteur de coupe est réglable.
A cause des inégalités du terrain, je dois me contenter d'une largeur de coupe de 60 cm (Quoique avec un pilotage bien étudié, je pourrais augmenter cette valeur )
l'essentiel du châssis est composé de tôles (coupées au laser) de pièces imprimées et de pièces usinées.
Je suis bien entendu prêt à partager mes plans pour ceux que ca intéresse.
Mon problème a moi, c'est la partie électronique.
pour moi c'est une vaste nébuleuse. Chaque fois que je me suis attelé à l'électronique, je me suis mangé les dents.
D'ou l 'idée d'Occitan de mutualiser les compétences a fait Tilt dans ma tête.
Je recherche donc de l'aide sur le l'électronique et je peux fournir de l'aide (conséquente) sur la partie mécanique.
Bonne journée a Tous
Dominique
1 Réponse(s)
Bonjour et merci pour votre réponse.
Pour la partie traction, j'utilise des motoréducteurs 24v 0.3 A.
Ils entrainent une roue dentée intérieure située dans chaque roue de la tondeuse.
Ce système permet une régularité de traction nécessaire à l'adhérence.
Pour la coupe, j'ai testé de nombreux moteurs sur un chassis poussé.
Pour de l'herbe, j'ai opté pour des moteurs brushless de ventilateurs qui sont données pour 84W en 24v et qui tournent a 3000 tr/mn
Pour débroussailler, j'ai opté pour des Outrunner 5045 qui font très bien le job.
Concernant mon manque de compétence il comprend aussi la programmation de l'Arduino ainsi que l'odométrie ou le Lidar.
Je sais par contre respecter un schéma de branchement et suivre des instructions.
A bientôt
0 Réponse(s)
Voici les premiers liens utiles: ( https://www.arduino.cc/reference/en/ ) et ( https://www.arduino.cc/en/Tutorial/HomePage ). D'autre part il y a un site français d'amateurs de modélisme ferroviaire qui peut être très utile ( https://www.locoduino.org/ avec une bonne intro https://www.locoduino.org/spip.php?article215). Au niveau bouquins, il y en a un qui rappelle d'abord les petites lois utiles d'électricité et d'électronique avant d'aborder la programmation Arduino: Le grand livre d'Arduino (Erik Bartmann).
1 Réponse(s)
Bravo pour votre projet qui est une mine d'informations. Je sèche un peu sur la partie algo de l'odométrie lorsqu'il y a des obstacles identifiés en amont à éviter. Certaines applications de robots tondeuses arrivent en fonction de la délimitation de la zone de coupe et de l'exclusion des obstacles à générer une trajectoire permettant de tondre toute la zone délimitée. Avez-vous quelques idées sur la façon d'aborder cette problématique ? Est-ce que l'algo de Kalman ne pourrait pas corriger la trajectoire lorsque le gps n'est pas captable ? Les algorithme A*, RRT, Dijkstra's ne semblent pas vraiment adaptés, qu'en pensez-vous ?
1 Réponse(s)
@Dominique: Il est difficile d'échanger au travers de ces commentaires. Je propose que tu décrives ton projet tel qu'il est aujourd'hui en utilisant les outils prévus. Il me semble qu'on pourrait alors réserver la dernière étape (ou plusieurs dernières) pour les échanges sur les différents sujets. On échangerait ainsi, explications, photos, fichiers de manière plus facile. D'autres que moi pourraient d'ailleurs participer. Lorsque le projet sera terminé et que tu auras décrit complètement ta machine, tu pourras même supprimer ces échanges si tu le souhaites. As-tu d'autres idées ? A bientôt.
8 Réponse(s)
Bonjour, j aimerais moi aussi fabriquer une tondeuse autonome guide par rtk.
Pouvez vous éventuellement montrer comment se font les corrections rtk entre la base et la tondeuse... peut on voir le code? Merci d'avance, en espérant avoir une réponse
0 Réponse(s)
Voici le lien: https://forums.futura-sciences.com/technologies/868817-faucheuse-guidee-gps-rtk.html - En plus de quelques explications supplémentaires on y trouver également quelques photos sur les moteurs à galets et sur les disques de coupe.
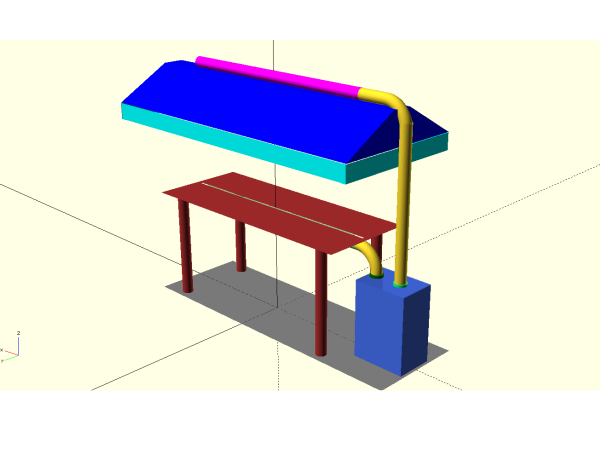
- 31 janvier 2025 à 10:10 (diff | hist) . . (+32) . . Table à lame d'air (actuelle)
- 21 janvier 2025 à 20:43 (diff | hist) . . (+18) . . Table à lame d'air
- 21 janvier 2025 à 20:39 (diff | hist) . . (+238) . . Table à lame d'air
- 21 janvier 2025 à 20:35 (diff | hist) . . (+985) . . Table à lame d'air
- 21 janvier 2025 à 18:16 (diff | hist) . . (+81) . . Table à lame d'air
- 20 janvier 2025 à 17:31 (diff | hist) . . (-24) . . Table à lame d'air
- 20 janvier 2025 à 17:26 (diff | hist) . . (+174) . . Table à lame d'air
- 18 janvier 2025 à 15:47 (diff | hist) . . (+2) . . Table à lame d'air
- 18 janvier 2025 à 15:39 (diff | hist) . . (+44) . . Table à lame d'air
- 18 janvier 2025 à 15:23 (diff | hist) . . (+300) . . Table à lame d'air
- 18 janvier 2025 à 15:03 (diff | hist) . . (+64) . . Table à lame d'air
- 17 janvier 2025 à 11:52 (diff | hist) . . (+476) . . Table à lame d'air
- 17 janvier 2025 à 11:35 (diff | hist) . . (+261) . . Table à lame d'air
- 10 janvier 2025 à 19:41 (diff | hist) . . (+145) . . Table à lame d'air
- 7 juin 2024 à 14:22 (diff | hist) . . (+38 067) . . Faucheuse guidée par GPS RTK (Annulation des modifications 171152 de Jameslukna (discussion)) (actuelle) (Balise : Annuler)
- 17 avril 2024 à 14:05 (diff | hist) . . (-11 738) . . Faucheuse guidée par GPS RTK
- 23 janvier 2024 à 20:00 (diff | hist) . . (+71) . . Table à lame d'air
- 23 janvier 2024 à 16:36 (diff | hist) . . (+170) . . Table à lame d'air
- 23 janvier 2024 à 16:28 (diff | hist) . . (-11) . . Table à lame d'air
- 23 janvier 2024 à 16:09 (diff | hist) . . (+373) . . Table à lame d'air
- 23 janvier 2024 à 15:41 (diff | hist) . . (+374) . . Table à lame d'air
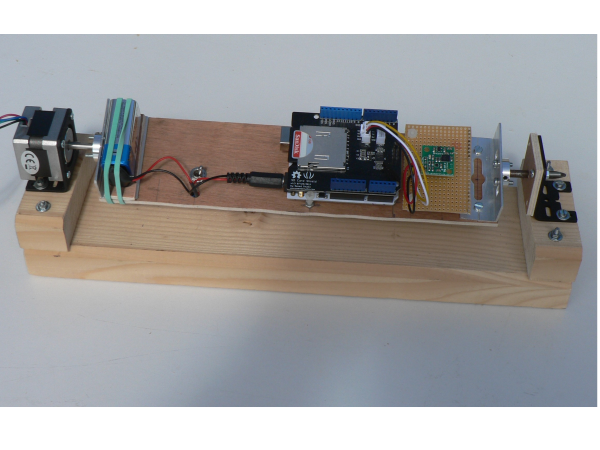
- 31 décembre 2023 à 10:01 (diff | hist) . . (+147) . . Mesure de la vitesse de rotation de la terre avec un gyromètre BOSCH BNO055 (actuelle)
- 31 décembre 2023 à 09:43 (diff | hist) . . (+589) . . Mesure de la vitesse de rotation de la terre avec un gyromètre BOSCH BNO055
- 10 septembre 2023 à 09:52 (diff | hist) . . (+14) . . Faucheuse guidée par GPS RTK
- 10 septembre 2023 à 09:45 (diff | hist) . . (+88) . . Faucheuse guidée par GPS RTK
- 10 septembre 2023 à 08:58 (diff | hist) . . (+67) . . Faucheuse guidée par GPS RTK
- 10 septembre 2023 à 08:53 (diff | hist) . . (-63) . . Faucheuse guidée par GPS RTK
- 9 septembre 2023 à 12:38 (diff | hist) . . (+103) . . Faucheuse guidée par GPS RTK
- 9 septembre 2023 à 12:31 (diff | hist) . . (+240) . . Faucheuse guidée par GPS RTK
- 9 septembre 2023 à 08:44 (diff | hist) . . (+262) . . Faucheuse guidée par GPS RTK
- 8 septembre 2023 à 18:50 (diff | hist) . . (+953) . . Faucheuse guidée par GPS RTK
- 8 septembre 2023 à 18:30 (diff | hist) . . (+414) . . Faucheuse guidée par GPS RTK
- 15 août 2023 à 14:08 (diff | hist) . . (+119) . . Faucheuse guidée par GPS RTK
- 15 août 2023 à 09:05 (diff | hist) . . (+56) . . Faucheuse guidée par GPS RTK
- 15 août 2023 à 09:00 (diff | hist) . . (+141) . . Faucheuse guidée par GPS RTK
- 15 août 2023 à 04:19 (diff | hist) . . (+62) . . Faucheuse guidée par GPS RTK
- 15 août 2023 à 04:05 (diff | hist) . . (-60) . . Faucheuse guidée par GPS RTK
- 3 août 2023 à 08:07 (diff | hist) . . (0) . . Appel pour que wikifab devienne le site de publication de tous les fablabs (actuelle)
- 1 août 2023 à 10:44 (diff | hist) . . (-21) . . Faucheuse guidée par GPS RTK
- 31 juillet 2023 à 16:59 (diff | hist) . . (+5) . . Faucheuse guidée par GPS RTK
- 31 juillet 2023 à 16:55 (diff | hist) . . (+253) . . Faucheuse guidée par GPS RTK
- 30 juillet 2023 à 17:07 (diff | hist) . . (+81) . . Faucheuse guidée par GPS RTK
- 7 juillet 2023 à 13:02 (diff | hist) . . (-8) . . Faucheuse guidée par GPS RTK
- 5 juillet 2023 à 11:45 (diff | hist) . . (+81) . . Faucheuse guidée par GPS RTK
- 5 juillet 2023 à 11:42 (diff | hist) . . (+311) . . Faucheuse guidée par GPS RTK
- 5 juillet 2023 à 11:33 (diff | hist) . . (+312) . . Faucheuse guidée par GPS RTK
- 5 juillet 2023 à 09:21 (diff | hist) . . (+166) . . Faucheuse guidée par GPS RTK
- 3 juillet 2023 à 12:29 (diff | hist) . . (+53) . . Faucheuse guidée par GPS RTK
- 3 juillet 2023 à 12:25 (diff | hist) . . (+177) . . Faucheuse guidée par GPS RTK
- 3 juillet 2023 à 12:12 (diff | hist) . . (+180) . . Faucheuse guidée par GPS RTK
- 25 juin 2023 à 07:51 (diff | hist) . . (+74) . . Dispositif de sécurité à enregistrement de zone de tir (actuelle)
- 17 juin 2023 à 08:46 (diff | hist) . . (+1) . . Faucheuse guidée par GPS RTK
- 17 juin 2023 à 08:44 (diff | hist) . . (+155) . . Faucheuse guidée par GPS RTK
- 17 juin 2023 à 08:42 (diff | hist) . . (+58) . . Faucheuse guidée par GPS RTK
- 11 juin 2023 à 07:33 (diff | hist) . . (+13) . . Faucheuse guidée par GPS RTK
- 11 juin 2023 à 07:29 (diff | hist) . . (+33) . . Faucheuse guidée par GPS RTK
- 11 juin 2023 à 07:27 (diff | hist) . . (+312) . . Faucheuse guidée par GPS RTK
- 9 juin 2023 à 14:29 (diff | hist) . . (-1) . . Faucheuse guidée par GPS RTK
- 9 juin 2023 à 14:05 (diff | hist) . . (+8) . . Faucheuse guidée par GPS RTK
- 9 juin 2023 à 13:58 (diff | hist) . . (+297) . . Faucheuse guidée par GPS RTK
- 9 juin 2023 à 12:32 (diff | hist) . . (0) . . Faucheuse guidée par GPS RTK
- 9 juin 2023 à 09:10 (diff | hist) . . (+15) . . Faucheuse guidée par GPS RTK
- 8 juin 2023 à 18:07 (diff | hist) . . (+559) . . Faucheuse guidée par GPS RTK
- 8 juin 2023 à 17:50 (diff | hist) . . (+154) . . Faucheuse guidée par GPS RTK
- 8 juin 2023 à 17:47 (diff | hist) . . (-50) . . Faucheuse guidée par GPS RTK
- 8 juin 2023 à 17:40 (diff | hist) . . (+2) . . Faucheuse guidée par GPS RTK
- 8 juin 2023 à 15:29 (diff | hist) . . (+84) . . Faucheuse guidée par GPS RTK
- 8 juin 2023 à 15:15 (diff | hist) . . (+713) . . Faucheuse guidée par GPS RTK
- 8 juin 2023 à 07:39 (diff | hist) . . (+218) . . Faucheuse guidée par GPS RTK
- 8 juin 2023 à 07:32 (diff | hist) . . (+112) . . Faucheuse guidée par GPS RTK
- 8 juin 2023 à 07:21 (diff | hist) . . (+184) . . Faucheuse guidée par GPS RTK
- 7 juin 2023 à 09:07 (diff | hist) . . (+16) . . Faucheuse guidée par GPS RTK
- 7 juin 2023 à 09:03 (diff | hist) . . (+36) . . Faucheuse guidée par GPS RTK
- 7 juin 2023 à 08:55 (diff | hist) . . (-56) . . Faucheuse guidée par GPS RTK
- 6 juin 2023 à 22:24 (diff | hist) . . (+149) . . Faucheuse guidée par GPS RTK
- 6 juin 2023 à 22:17 (diff | hist) . . (+366) . . Faucheuse guidée par GPS RTK
- 6 juin 2023 à 16:00 (diff | hist) . . (+839) . . Faucheuse guidée par GPS RTK
- 6 juin 2023 à 15:22 (diff | hist) . . (+173) . . Faucheuse guidée par GPS RTK
- 6 juin 2023 à 15:15 (diff | hist) . . (+27) . . Faucheuse guidée par GPS RTK
- 6 juin 2023 à 15:10 (diff | hist) . . (+164) . . Faucheuse guidée par GPS RTK
- 6 juin 2023 à 14:59 (diff | hist) . . (+31) . . Faucheuse guidée par GPS RTK
- 6 juin 2023 à 14:54 (diff | hist) . . (-84) . . Faucheuse guidée par GPS RTK
- 6 juin 2023 à 14:28 (diff | hist) . . (-336) . . Faucheuse guidée par GPS RTK
- 6 juin 2023 à 12:24 (diff | hist) . . (+12) . . Faucheuse guidée par GPS RTK
- 6 juin 2023 à 12:23 (diff | hist) . . (+3) . . Faucheuse guidée par GPS RTK
- 6 juin 2023 à 12:22 (diff | hist) . . (+48) . . Faucheuse guidée par GPS RTK
- 6 juin 2023 à 10:51 (diff | hist) . . (+343) . . Faucheuse guidée par GPS RTK
- 6 juin 2023 à 10:36 (diff | hist) . . (+442) . . Faucheuse guidée par GPS RTK
- 6 juin 2023 à 09:44 (diff | hist) . . (+854) . . Faucheuse guidée par GPS RTK
- 31 mai 2023 à 06:54 (diff | hist) . . (+7) . . Faucheuse guidée par GPS RTK
- 31 mai 2023 à 06:51 (diff | hist) . . (+157) . . Faucheuse guidée par GPS RTK
- 31 mai 2023 à 06:44 (diff | hist) . . (+169) . . Faucheuse guidée par GPS RTK
- 31 mai 2023 à 06:37 (diff | hist) . . (+3) . . Faucheuse guidée par GPS RTK
- 27 mai 2023 à 16:47 (diff | hist) . . (+295) . . Faucheuse guidée par GPS RTK
- 27 mai 2023 à 08:27 (diff | hist) . . (+1) . . Faucheuse guidée par GPS RTK
- 27 mai 2023 à 08:19 (diff | hist) . . (+65) . . Faucheuse guidée par GPS RTK
- 27 mai 2023 à 08:09 (diff | hist) . . (+226) . . Faucheuse guidée par GPS RTK
- 26 mai 2023 à 21:26 (diff | hist) . . (+100) . . Faucheuse guidée par GPS RTK
- 26 mai 2023 à 19:54 (diff | hist) . . (+865) . . Faucheuse guidée par GPS RTK
- 26 mai 2023 à 18:58 (diff | hist) . . (+248) . . Faucheuse guidée par GPS RTK
- 4 avril 2023 à 10:02 (diff | hist) . . (+13) . . Faucheuse guidée par GPS RTK
- 3 avril 2023 à 19:08 (diff | hist) . . (+4) . . Faucheuse guidée par GPS RTK
- 3 avril 2023 à 19:06 (diff | hist) . . (-1) . . Faucheuse guidée par GPS RTK
- 3 avril 2023 à 19:03 (diff | hist) . . (+378) . . Faucheuse guidée par GPS RTK
- 3 avril 2023 à 18:40 (diff | hist) . . (+205) . . Faucheuse guidée par GPS RTK
- 20 mars 2023 à 10:22 (diff | hist) . . (+130) . . Faucheuse guidée par GPS RTK
- 5 janvier 2023 à 12:13 (diff | hist) . . (+21) . . Faucheuse guidée par GPS RTK
- 5 janvier 2023 à 12:12 (diff | hist) . . (-9) . . Faucheuse guidée par GPS RTK
- 5 janvier 2023 à 12:10 (diff | hist) . . (+16) . . Faucheuse guidée par GPS RTK
- 5 janvier 2023 à 12:07 (diff | hist) . . (+149) . . Faucheuse guidée par GPS RTK
- 31 décembre 2022 à 15:35 (diff | hist) . . (+109) . . Table à lame d'air
- 31 décembre 2022 à 15:30 (diff | hist) . . (+106) . . Table à lame d'air
- 31 décembre 2022 à 15:20 (diff | hist) . . (+53) . . Table à lame d'air
- 31 décembre 2022 à 15:17 (diff | hist) . . (+121) . . Table à lame d'air
- 31 décembre 2022 à 15:12 (diff | hist) . . (+125) . . Table à lame d'air
- 20 décembre 2022 à 20:29 (diff | hist) . . (-5) . . Faucheuse guidée par GPS RTK
- 20 décembre 2022 à 20:26 (diff | hist) . . (+120) . . Faucheuse guidée par GPS RTK
- 18 décembre 2022 à 14:38 (diff | hist) . . (+73) . . Faucheuse guidée par GPS RTK
- 8 décembre 2022 à 09:46 (diff | hist) . . (+443) . . Faucheuse guidée par GPS RTK
- 8 décembre 2022 à 09:28 (diff | hist) . . (+28) . . Faucheuse guidée par GPS RTK
- 8 décembre 2022 à 09:25 (diff | hist) . . (+105) . . Faucheuse guidée par GPS RTK
- 31 juillet 2022 à 12:02 (diff | hist) . . (+12) . . Dispositif de sécurité à enregistrement de zone de tir
- 31 juillet 2022 à 10:03 (diff | hist) . . (+193) . . Dispositif de sécurité à enregistrement de zone de tir
- 31 juillet 2022 à 09:51 (diff | hist) . . (+93) . . Dispositif de sécurité à enregistrement de zone de tir
- 21 juillet 2022 à 07:34 (diff | hist) . . (+147) . . Dispositif de sécurité à enregistrement de zone de tir
- 21 juillet 2022 à 07:27 (diff | hist) . . (+162) . . Dispositif de sécurité à enregistrement de zone de tir
- 16 juillet 2022 à 17:51 (diff | hist) . . (+8) . . Dispositif de sécurité à enregistrement de zone de tir
- 16 juillet 2022 à 17:45 (diff | hist) . . (+54) . . Dispositif de sécurité à enregistrement de zone de tir
- 16 juillet 2022 à 17:39 (diff | hist) . . (+8) . . Dispositif de sécurité à enregistrement de zone de tir
- 16 juillet 2022 à 17:32 (diff | hist) . . (+99) . . Dispositif de sécurité à enregistrement de zone de tir
- 16 juillet 2022 à 17:22 (diff | hist) . . (+95) . . Dispositif de sécurité à enregistrement de zone de tir
- 16 juillet 2022 à 16:57 (diff | hist) . . (+12) . . Dispositif de sécurité à enregistrement de zone de tir
- 16 juillet 2022 à 16:53 (diff | hist) . . (+6) . . Dispositif de sécurité à enregistrement de zone de tir
- 16 juillet 2022 à 16:52 (diff | hist) . . (+66) . . Dispositif de sécurité à enregistrement de zone de tir
- 16 juillet 2022 à 16:46 (diff | hist) . . (+8) . . Dispositif de sécurité à enregistrement de zone de tir
- 16 juillet 2022 à 06:52 (diff | hist) . . (+2) . . Dispositif de sécurité à enregistrement de zone de tir
- 16 juillet 2022 à 06:41 (diff | hist) . . (+232) . . Dispositif de sécurité à enregistrement de zone de tir
- 9 juillet 2022 à 19:32 (diff | hist) . . (+22) . . Dispositif de sécurité à enregistrement de zone de tir
- 9 juillet 2022 à 19:29 (diff | hist) . . (+1) . . Dispositif de sécurité à enregistrement de zone de tir
- 9 juillet 2022 à 19:23 (diff | hist) . . (+213) . . Dispositif de sécurité à enregistrement de zone de tir
- 9 juillet 2022 à 19:03 (diff | hist) . . (+378) . . Dispositif de sécurité à enregistrement de zone de tir
- 9 juillet 2022 à 18:43 (diff | hist) . . (+218) . . Dispositif de sécurité à enregistrement de zone de tir
- 9 juillet 2022 à 17:48 (diff | hist) . . (+25) . . Dispositif de sécurité à enregistrement de zone de tir
- 9 juillet 2022 à 17:45 (diff | hist) . . (+31) . . Dispositif de sécurité à enregistrement de zone de tir
- 9 juillet 2022 à 17:38 (diff | hist) . . (+381) . . Dispositif de sécurité à enregistrement de zone de tir
- 26 juin 2022 à 17:23 (diff | hist) . . (+6) . . Dispositif de sécurité à enregistrement de zone de tir
- 26 juin 2022 à 16:54 (diff | hist) . . (+33) . . Dispositif de sécurité à enregistrement de zone de tir
- 26 juin 2022 à 16:46 (diff | hist) . . (+126) . . Dispositif de sécurité à enregistrement de zone de tir
- 26 juin 2022 à 16:36 (diff | hist) . . (+174) . . Dispositif de sécurité à enregistrement de zone de tir
- 26 juin 2022 à 16:27 (diff | hist) . . (+289) . . Dispositif de sécurité à enregistrement de zone de tir
- 1 juin 2022 à 22:38 (diff | hist) . . (-101) . . Dispositif de sécurité à enregistrement de zone de tir
- 25 mai 2022 à 23:10 (diff | hist) . . (+65) . . Dispositif de sécurité à enregistrement de zone de tir
- 25 mai 2022 à 23:07 (diff | hist) . . (+2) . . Dispositif de sécurité à enregistrement de zone de tir
- 25 mai 2022 à 23:05 (diff | hist) . . (+46) . . Dispositif de sécurité à enregistrement de zone de tir
- 25 mai 2022 à 08:46 (diff | hist) . . (+218) . . Dispositif de sécurité à enregistrement de zone de tir
- 1 mai 2022 à 13:40 (diff | hist) . . (+1) . . Appel pour que wikifab devienne le site de publication de tous les fablabs
- 30 avril 2022 à 14:13 (diff | hist) . . (+2) . . Appel pour que wikifab devienne le site de publication de tous les fablabs
- 30 avril 2022 à 14:11 (diff | hist) . . (+255) . . Appel pour que wikifab devienne le site de publication de tous les fablabs
- 29 avril 2022 à 18:17 (diff | hist) . . (+28) . . Dispositif de sécurité à enregistrement de zone de tir
- 29 avril 2022 à 18:14 (diff | hist) . . (+3) . . Dispositif de sécurité à enregistrement de zone de tir
- 29 avril 2022 à 11:03 (diff | hist) . . (+12) . . Dispositif de sécurité à enregistrement de zone de tir
- 29 avril 2022 à 10:52 (diff | hist) . . (+2) . . Dispositif de sécurité à enregistrement de zone de tir
- 29 avril 2022 à 10:51 (diff | hist) . . (+4) . . Dispositif de sécurité à enregistrement de zone de tir
- 29 avril 2022 à 10:49 (diff | hist) . . (-116) . . Dispositif de sécurité à enregistrement de zone de tir
- 29 avril 2022 à 10:47 (diff | hist) . . (+45) . . Dispositif de sécurité à enregistrement de zone de tir
- 29 avril 2022 à 10:39 (diff | hist) . . (-167) . . Dispositif de sécurité à enregistrement de zone de tir
- 29 avril 2022 à 10:34 (diff | hist) . . (+104) . . Dispositif de sécurité à enregistrement de zone de tir
- 29 avril 2022 à 10:27 (diff | hist) . . (+115) . . Dispositif de sécurité à enregistrement de zone de tir
- 29 avril 2022 à 10:16 (diff | hist) . . (+17) . . Dispositif de sécurité à enregistrement de zone de tir
- 29 avril 2022 à 10:13 (diff | hist) . . (+205) . . Dispositif de sécurité à enregistrement de zone de tir
- 28 avril 2022 à 09:49 (diff | hist) . . (-2) . . Dispositif de sécurité à enregistrement de zone de tir
- 27 avril 2022 à 14:55 (diff | hist) . . (-5) . . Dispositif de sécurité à enregistrement de zone de tir
- 27 avril 2022 à 14:52 (diff | hist) . . (+5) . . Dispositif de sécurité à enregistrement de zone de tir
- 27 avril 2022 à 14:49 (diff | hist) . . (+86) . . Dispositif de sécurité à enregistrement de zone de tir
- 27 avril 2022 à 14:40 (diff | hist) . . (+83) . . Dispositif de sécurité à enregistrement de zone de tir
- 27 avril 2022 à 14:28 (diff | hist) . . (+895) . . Dispositif de sécurité à enregistrement de zone de tir
- 27 avril 2022 à 14:05 (diff | hist) . . (+1 029) . . Dispositif de sécurité à enregistrement de zone de tir
- 27 avril 2022 à 11:43 (diff | hist) . . (-101) . . Dispositif de sécurité à enregistrement de zone de tir
- 27 avril 2022 à 11:41 (diff | hist) . . (-23) . . Dispositif de sécurité à enregistrement de zone de tir
- 25 avril 2022 à 14:21 (diff | hist) . . (+36) . . Dispositif de sécurité à enregistrement de zone de tir
- 25 avril 2022 à 14:18 (diff | hist) . . (+13) . . Dispositif de sécurité à enregistrement de zone de tir
- 18 avril 2022 à 11:27 (diff | hist) . . (+276) . . Table à lame d'air
- 4 avril 2022 à 10:16 (diff | hist) . . (+109) . . Dispositif de sécurité à enregistrement de zone de tir
- 3 avril 2022 à 11:19 (diff | hist) . . (+10) . . Dispositif de sécurité à enregistrement de zone de tir
- 3 avril 2022 à 11:17 (diff | hist) . . (+84) . . Dispositif de sécurité à enregistrement de zone de tir
- 2 avril 2022 à 19:36 (diff | hist) . . (+9) . . Dispositif de sécurité à enregistrement de zone de tir
- 2 avril 2022 à 19:35 (diff | hist) . . (-3) . . Dispositif de sécurité à enregistrement de zone de tir
- 2 avril 2022 à 19:33 (diff | hist) . . (+93) . . Dispositif de sécurité à enregistrement de zone de tir
- 2 avril 2022 à 19:29 (diff | hist) . . (+110) . . Dispositif de sécurité à enregistrement de zone de tir
- 2 avril 2022 à 19:25 (diff | hist) . . (+102) . . Dispositif de sécurité à enregistrement de zone de tir
- 2 avril 2022 à 19:15 (diff | hist) . . (+266) . . Dispositif de sécurité à enregistrement de zone de tir
- 2 avril 2022 à 19:11 (diff | hist) . . (+113) . . Dispositif de sécurité à enregistrement de zone de tir
- 1 avril 2022 à 15:34 (diff | hist) . . (-1) . . Dispositif de sécurité à enregistrement de zone de tir
- 31 mars 2022 à 15:04 (diff | hist) . . (+8) . . Dispositif de sécurité à enregistrement de zone de tir
- 31 mars 2022 à 15:02 (diff | hist) . . (+203) . . Dispositif de sécurité à enregistrement de zone de tir
- 31 mars 2022 à 14:23 (diff | hist) . . (-9) . . Dispositif de sécurité à enregistrement de zone de tir
- 31 mars 2022 à 14:17 (diff | hist) . . (+213) . . Dispositif de sécurité à enregistrement de zone de tir
- 31 mars 2022 à 13:59 (diff | hist) . . (+172) . . Dispositif de sécurité à enregistrement de zone de tir
- 31 mars 2022 à 13:46 (diff | hist) . . (+596) . . Dispositif de sécurité à enregistrement de zone de tir
- 31 mars 2022 à 12:48 (diff | hist) . . (-3) . . Dispositif de sécurité à enregistrement de zone de tir
Je les ai fait :
Favoris



 Français
Français English
English Deutsch
Deutsch Español
Español Italiano
Italiano Português
Português