| Ligne 36 : | Ligne 36 : | ||
<br /></translate> | <br /></translate> | ||
| − | |Step_Picture_00=Robot_hexapode_Capture_d_e_cran_2022-04- | + | |Step_Picture_00=Robot_hexapode_Capture_d_e_cran_2022-04-20_a_10.33.18.png |
| − | + | |Step_Picture_01=Robot_hexapode_Capture_d_e_cran_2022-04-20_a_10.34.56.png | |
| − | |Step_Picture_01=Robot_hexapode_Capture_d_e_cran_2022-04- | + | |Step_Picture_02=Robot_hexapode_Capture_d_e_cran_2022-04-20_a_10.38.03.png |
| − | |Step_Picture_02=Robot_hexapode_Capture_d_e_cran_2022-04- | + | |Step_Picture_03=Robot_hexapode_Capture_d_e_cran_2022-04-20_a_10.40.07.png |
| − | |Step_Picture_03=Robot_hexapode_Capture_d_e_cran_2022-04- | + | |Step_Picture_04=Robot_hexapode_Capture_d_e_cran_2022-04-20_a_10.40.30.png |
| − | |Step_Picture_04=Robot_hexapode_Capture_d_e_cran_2022-04- | + | |Step_Picture_05=Robot_hexapode_Capture_d_e_cran_2022-04-20_a_10.41.50.png |
| − | |Step_Picture_05=Robot_hexapode_Capture_d_e_cran_2022-04- | ||
}} | }} | ||
{{Tuto Step | {{Tuto Step | ||
|Step_Title=<translate>Câblage</translate> | |Step_Title=<translate>Câblage</translate> | ||
|Step_Content=<translate>2 batteries de 3.7V seront nécessaires pour le faire marcher.</translate> | |Step_Content=<translate>2 batteries de 3.7V seront nécessaires pour le faire marcher.</translate> | ||
| − | |Step_Picture_00=Robot_hexapode_Capture_d_e_cran_2022-04- | + | |Step_Picture_00=Robot_hexapode_Capture_d_e_cran_2022-04-20_a_10.46.04.png |
| − | |Step_Picture_01=Robot_hexapode_Capture_d_e_cran_2022-04- | + | |Step_Picture_01=Robot_hexapode_Capture_d_e_cran_2022-04-20_a_10.47.57.png |
| − | |Step_Picture_02=Robot_hexapode_Capture_d_e_cran_2022-04- | + | |Step_Picture_02=Robot_hexapode_Capture_d_e_cran_2022-04-20_a_10.49.27.png |
| − | |Step_Picture_03=Robot_hexapode_Capture_d_e_cran_2022-04- | + | |Step_Picture_03=Robot_hexapode_Capture_d_e_cran_2022-04-20_a_10.50.25.png |
| − | |||
| − | |||
}} | }} | ||
{{Tuto Step | {{Tuto Step | ||
| Ligne 61 : | Ligne 58 : | ||
Et l'application ProcessingApp suffira à contrôler le robot.</translate> | Et l'application ProcessingApp suffira à contrôler le robot.</translate> | ||
| − | |Step_Picture_00=Robot_hexapode_Capture_d_e_cran_2022-04-06_a_11. | + | |Step_Picture_00=Robot_hexapode_Capture_d_e_cran_2022-04-06_a_11.44.35.png |
| − | | | + | |Step_Picture_00_annotation={"version":"2.4.6","objects":[{"type":"image","version":"2.4.6","originX":"left","originY":"top","left":0,"top":0,"width":1018,"height":1245,"fill":"rgb(0,0,0)","stroke":null,"strokeWidth":0,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":0.59,"scaleY":0.59,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"crossOrigin":"","cropX":0,"cropY":0,"src":"https://wikifab.org/images/4/4e/Robot_hexapode_Capture_d_e_cran_2022-04-06_a_11.44.35.png","filters":[]}],"height":734,"width":600} |
| − | |Step_Picture_01_annotation={"version":"2.4.6","objects":[{"type":"image","version":"2.4.6","originX":"left","originY":"top","left":0,"top":0,"width": | + | |Step_Picture_01=Robot_hexapode_Capture_d_e_cran_2022-04-20_a_10.51.31.png |
| − | |Step_Picture_02=Robot_hexapode_Capture_d_e_cran_2022-04- | + | |Step_Picture_01_annotation={"version":"2.4.6","objects":[{"type":"image","version":"2.4.6","originX":"left","originY":"top","left":0,"top":0,"width":748,"height":900,"fill":"rgb(0,0,0)","stroke":null,"strokeWidth":0,"strokeDashArray":null,"strokeLineCap":"butt","strokeDashOffset":0,"strokeLineJoin":"miter","strokeMiterLimit":4,"scaleX":0.8,"scaleY":0.8,"angle":0,"flipX":false,"flipY":false,"opacity":1,"shadow":null,"visible":true,"clipTo":null,"backgroundColor":"","fillRule":"nonzero","paintFirst":"fill","globalCompositeOperation":"source-over","transformMatrix":null,"skewX":0,"skewY":0,"crossOrigin":"","cropX":0,"cropY":0,"src":"https://wikifab.org/images/e/ed/Robot_hexapode_Capture_d_e_cran_2022-04-20_a_10.51.31.png","filters":[]}],"height":722,"width":600} |
| + | |Step_Picture_02=Robot_hexapode_Capture_d_e_cran_2022-04-20_a_10.52.51.png | ||
| + | |Step_Picture_03=Robot_hexapode_Capture_d_e_cran_2022-04-20_a_10.49.27.png | ||
| + | |Step_Picture_04=Robot_hexapode_Capture_d_e_cran_2022-04-20_a_10.54.39.png | ||
| + | |Step_Picture_05=Robot_hexapode_Capture_d_e_cran_2022-04-20_a_10.58.24.png | ||
}} | }} | ||
{{Tuto Step | {{Tuto Step | ||
|Step_Title=<translate>Calibration</translate> | |Step_Title=<translate>Calibration</translate> | ||
|Step_Content=<translate></translate> | |Step_Content=<translate></translate> | ||
| + | |Step_Picture_00=Robot_hexapode_Capture_d_e_cran_2022-04-20_a_10.35.31.png | ||
| + | |Step_Picture_01=Robot_hexapode_Capture_d_e_cran_2022-04-20_a_10.59.43.png | ||
}} | }} | ||
{{Notes | {{Notes | ||
Version du 20 avril 2022 à 11:00
Apprendre à programmer et à monter un robot


Difficulté
Difficile
Durée
25 heure(s)
Catégories
Électronique, Machines & Outils, Robotique
Coût
125 EUR (€)
Introduction
Vous avez reçu un robot en kit de chez Freenove.
Pour l'assembler, vous devez vous aider du kit d'installation sur le site internet de Freenove. Le lien et le type de robot sont marqués sur la boite du robot.
Dans ce tutoriel, nous allons nous concentrer sur le robot hexapode, dont le comportement est proche de celui d'une araignée (pour rappel une araignée possède 8 pattes).Youtube
Matériaux
Outils
Étape 1 - Assemblage/Montage
Une carte microcontrôleur sur laquelle on va connecter les 12 servo-moteurs (2 par patte), et un petit module WIFI ESP 8266 composent l'essentiel de ce robot.
Vous trouverez dans la partie Fichiers (à coté de Outils et Matériaux) un lien vidéo pour l'assemblage.






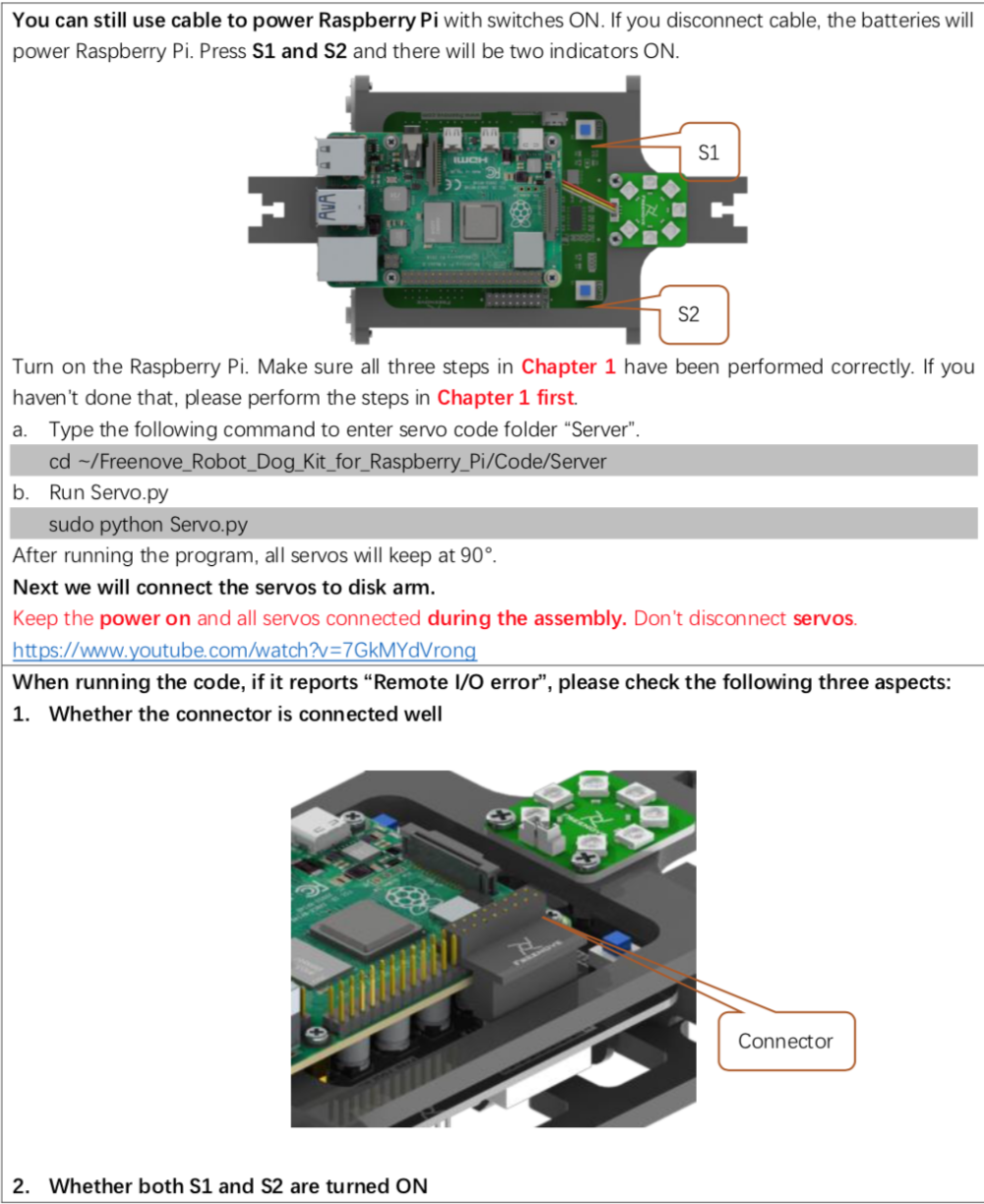
Étape 2 - Câblage
2 batteries de 3.7V seront nécessaires pour le faire marcher.




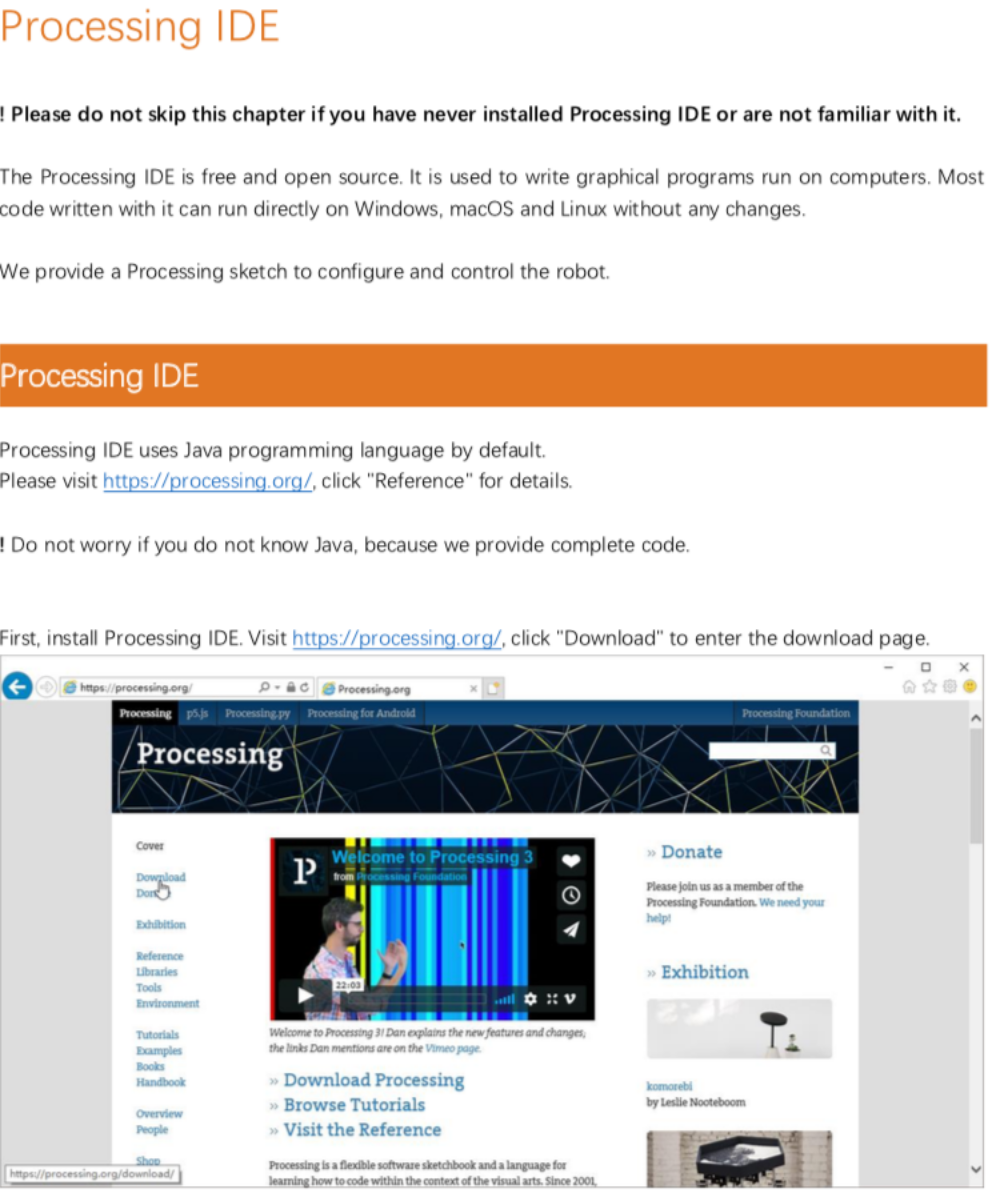
Étape 3 - Programmation
Ce robot est compatible avec l'environnement de programmation Arduino et Processing sur les 3 plateformes d'exploitation (Windows, Mac Os et Linux).
Il faudra y télécharger quelques librairies : FNHR, FlexiTimer2, RF24 sur Arduino et IP5 sur Processing.
Et l'application ProcessingApp suffira à contrôler le robot.



Étape 4 - Calibration


Notes et références
Si vous avez des difficultés avec le montage des robots ou qu'il vous manque des pièces, vous pouvez aller sur le site https://freenove.com/
Draft
 Français
Français English
English Deutsch
Deutsch Español
Español Italiano
Italiano Português
Português